

 Mon contenu
Mon contenu Homme
Homme








Salut le câblage fini d'être fait et installer et pour les curieux une photo ... Heu deux en faite.

Donc voilà si vous avez des questions ou remarques n'hésitez pas.
 Posté par
- 18 octobre 2017 - 08:39
Posté par
- 18 octobre 2017 - 08:39
 bonne lecture
bonne lecture
Posté par
- 18 octobre 2017 - 11:47
Posté par
- 16 octobre 2017 - 10:38
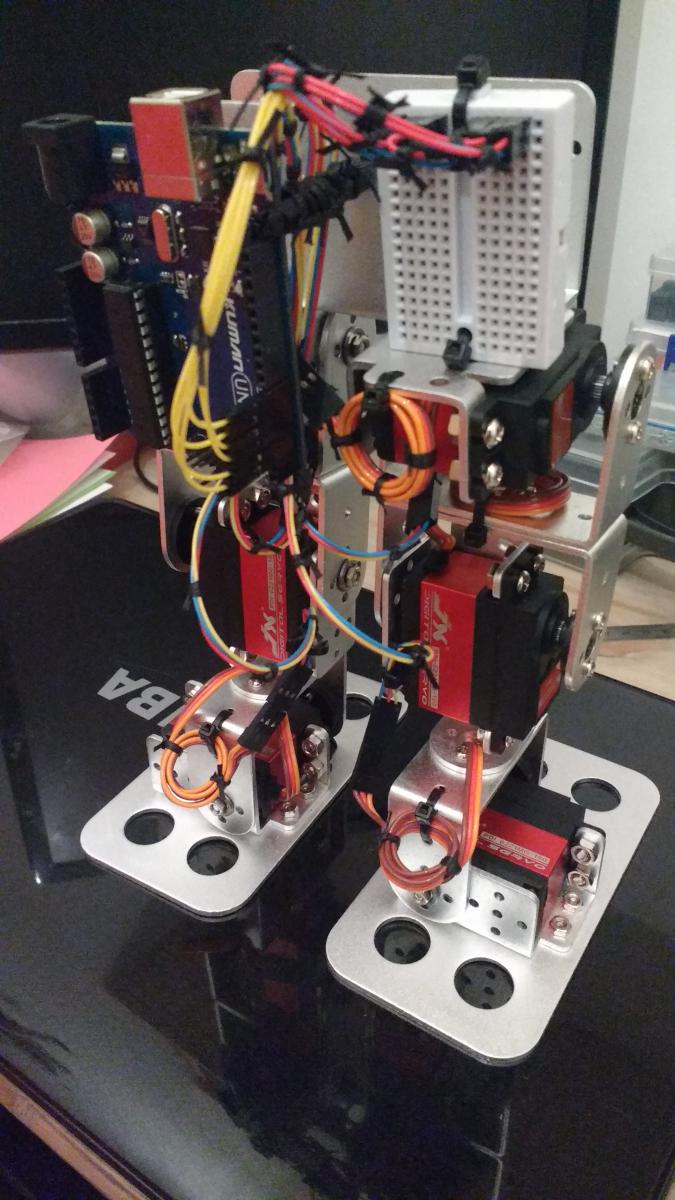
Salut à tous, on va donner quelques news du projet avec des photos cette fois ci (Plus intéressant et plus parlant).

Donc le voila assembler avec les pièces que j'ai reçu. Il est petit, oui et il a pas de bas, oui parce qu'avant de monter un truc énorme, je vais surtout essayer de m'améliorer niveau code avec lui qui est mieux réaliser que le premier pour pouvoir travailler sur un bipède convenable.

La vous pouvez apprécier (ou non ) avec les servos montés et j'en ai un peu chier. Les servos sont limites niveau taille (faut pas plus gros), j'ai du entièrement tout désassembler pour mettre les têtes de vis à l'intérieur des structures sinon les blocs des servos été en contraintes dessus.
@Path Est-Ce que tu as rencontrer le même problème que moi sur Emile?
@Olivier17 Merci de m'avoir guidé avec tout ses achats surtout les servos qui marche parfaitement bien, juste la dead band qui n'est pas de 2µs mais de 4µs c'est un peu dommage mais bon je cherchais surtout du couple et de la vitesse quand même.
Il me reste encore a câbler tout ça, faire un chassis pour monter ma carte arduino dessus et commencer a coder, les batteries je verrai ça plus tard plus trop de budget en ce moment (Saloperie de saisons des impôts).
On va essayer de voir de le repeindre aussi pour le customs quand même qu'il ne ressemble pas à d'autres, et voilà pour les news.
Aussi je lui est trouver un nom à ce salopard ce sera S.A.B.R et ouais ça fait peur dit comme ça.
Au plaisir de m'avoir lu et je reste à votre dispo pour des questions et/ou critique.
Posté par
- 10 octobre 2017 - 08:34
Posté par
- 05 octobre 2017 - 05:04
Posté par
- 26 septembre 2017 - 05:32
.
Posté par
- 24 septembre 2017 - 07:54
Posté par
- 19 septembre 2017 - 09:02
Posté par
- 05 septembre 2017 - 09:35
Posté par
- 03 septembre 2017 - 06:54
. Je vais sûrement prendre des towerpro mg995 peux cher et très robuste et de qualité.
Posté par
- 25 août 2017 - 12:57
Posté par
- 24 août 2017 - 09:39
Bonjour à tous, voilà comme promis mon premier robot bipède en photo :
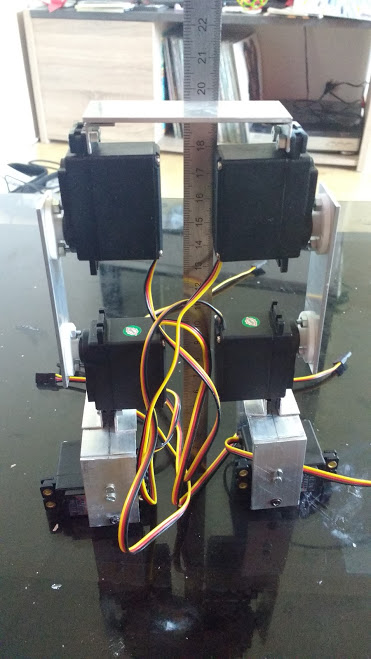
Donc voila la bête faite maison, il fait déjà presque 20 cm de haut avec que les jambes.
Pourquoi ce projet ? Eh bien parce que depuis longtemps les robots bipède me fascine, je suis mécanicien avion depuis plus de 10 ans maintenant et j'ai pu ressentir que les machines ont une âme. C'est con mais c'est ce que je ressens. J'ai pu rencontrer des avions avec des caractères différents, certains plus facile à vivre que d'autres, certains ne veulent rien savoir et d'autres ont juste besoin d'amour pour voler.
Donc ce projet de robot bipède est là pour assouvir mes souhaits et voir jusqu'où je peux aller en termes intellectuels. J'ai envie depuis très longtemps de découvrir la programmation et ce moyen est pour moi le meilleur, le plus concret (j'ai du mal avec l'abstrait) et le plus sympa. Je compte rajouter petit à petit des éléments électroniques comme différents capteurs mais ça ont verra petit à petit en fonction de mes capacités limiter de programmateur pour le moment.
Ce robot est fait maison la partie métallique est faite d'alu acheter chez Castorama que j'ai découper à la scie à métaux, percé avec une Dremel et un foret, j'ai utilisé de la colle (super glue) pour certains éléments comme les équerres, et des vis de mon travail en alu. Donc pas cher pour cette partie mais long (3 jours pour déjà faire ça) mais cela me permet de n'avoir aucun scrupule à modifier, améliorer voir casser et que je trouve plus évolutif qu'un kit.
Il me reste encore à lui faire des pieds avant de pouvoir passer aux premier essais sous tensions, faire un peu de finitions comme arrondir les angles au niveau des axes des servos pour retirer du poids inutile et si cela est concluant je pourrai mettre la carte, l'alimentation, lui faire une tête et des bras mais tout cela petit a petit pour résoudre les problèmes pas à pas.
Pour la partie électronique j'ai pris, enfin j'avais déja des servos Hitec HS-311, c'est pas les moins cher (12 € l'unité) pas très robuste (engrenage plastique) mais supportant 15kg/cm donc on verra bien jusqu'où ils m'emmèneront. Si vous avez des conseils pour les servos je suis preneur.
J'ai une carte Arduino Uno non officielle ( je sais c'est pas bien mais pas envie de cramer une carte cher avec des manipulations de débutant). Cette carte je l'ai acheter dans un kit débutant assez important pour débuter.
Après pour les cartes j'ai pu voir qu'il en existait diverses et j'aimerais connaître les différences entre Arduino/ Rasberry et les autres. Pour le moment l'Arduino est bien, facile à prendre en main et à programmer pour le moment.
Je commence à regarder pour acheter du câblage et des pinouilles et sockets (pas moyen d'en avoir au travail et pas envie de dépouiller les avions) pour pouvoir continuer à câbler une fois les essais sous tension terminé.
Donc voila pour le début, mais il me reste tellement de questions de cultures comme les différents capteurs et comment les mettre en oeuvre. Faut aussi que je progresse en programmation Arduino afin de me sentir plus à l'aise.
Si vous avez des questions j'y répondrai volontiers et je prends toutes les critiques car ce sont elles aussi qui font avancer surtout les points de vue extérieur.
Merci de m'avoir lu et je ferais vivre ce post en fonction de mon avancement.
A bientôt




