

 Mon contenu
Mon contenu Homme
Homme





En ce moment je bosse sur les aménagements intérieur pour caser la Raspberry, l'éclairage et la caméra. Voici une "évocation du résultat final :
 Posté par
- 05 mai 2019 - 02:48
Posté par
- 05 mai 2019 - 02:48
A chaque fois que j'ai eu besoin de matière première pour un robot j'ai passé commande sur Block en Stock. Mais j'ai jamais osé usiné dans ma chambre, toujours dans le labo de l'école d'ingé. (qui heureusement ne contrôle pas trop les entrées ce qui m'a permis de me servir du matos bien après avoir fini mes études  ).
).
Posté par
- 05 mai 2019 - 02:37
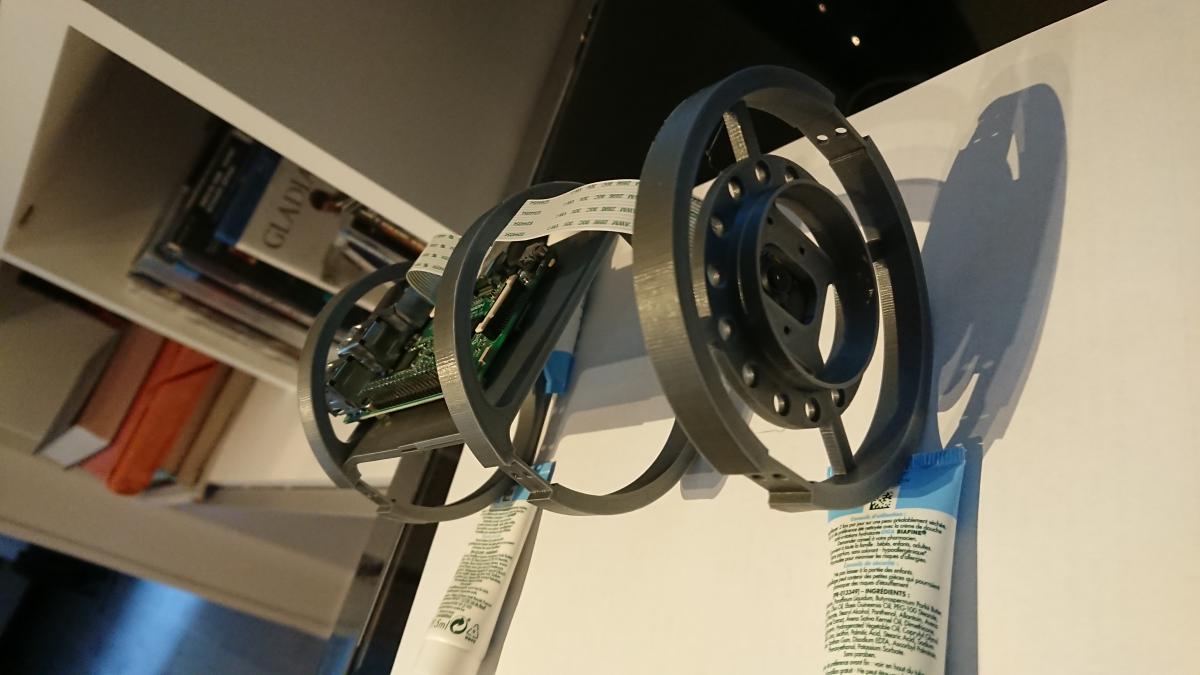
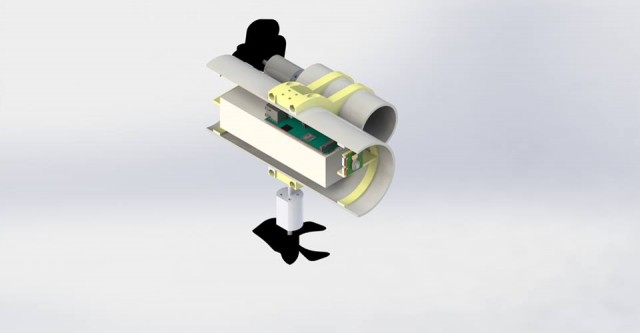
Donc, à défaut de travailler sur mon sous-marin (faut vraiment que je m'y remette, donnez moi plus de vacances !!), je travaille sur l'enregistreur sous-marin. Et c'est presque finis ! Quelques photos des essais d'agencement intérieur :
Tout tiens dans une boîte de dérivation électrique (presque) étanche (IP55, il faudra que je rajoute un joint pour la rendre complètement étanche) :

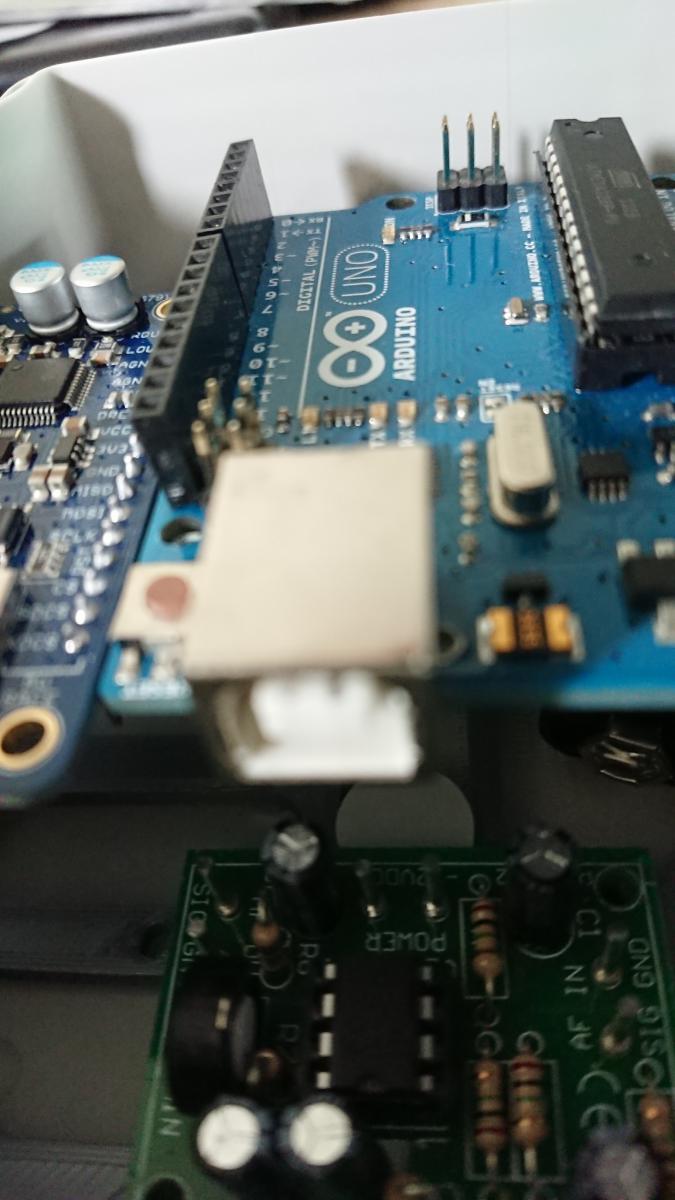
Et voici ce que ça donne à l'intérieur :

Il y a une Arduino Uno qui fournit la régulation de tension (alimentation pile 9V => 5V) et une carte VS1053 d'Adafruit pour numériser et enregistrer l'audio (exemple d'implémentation).
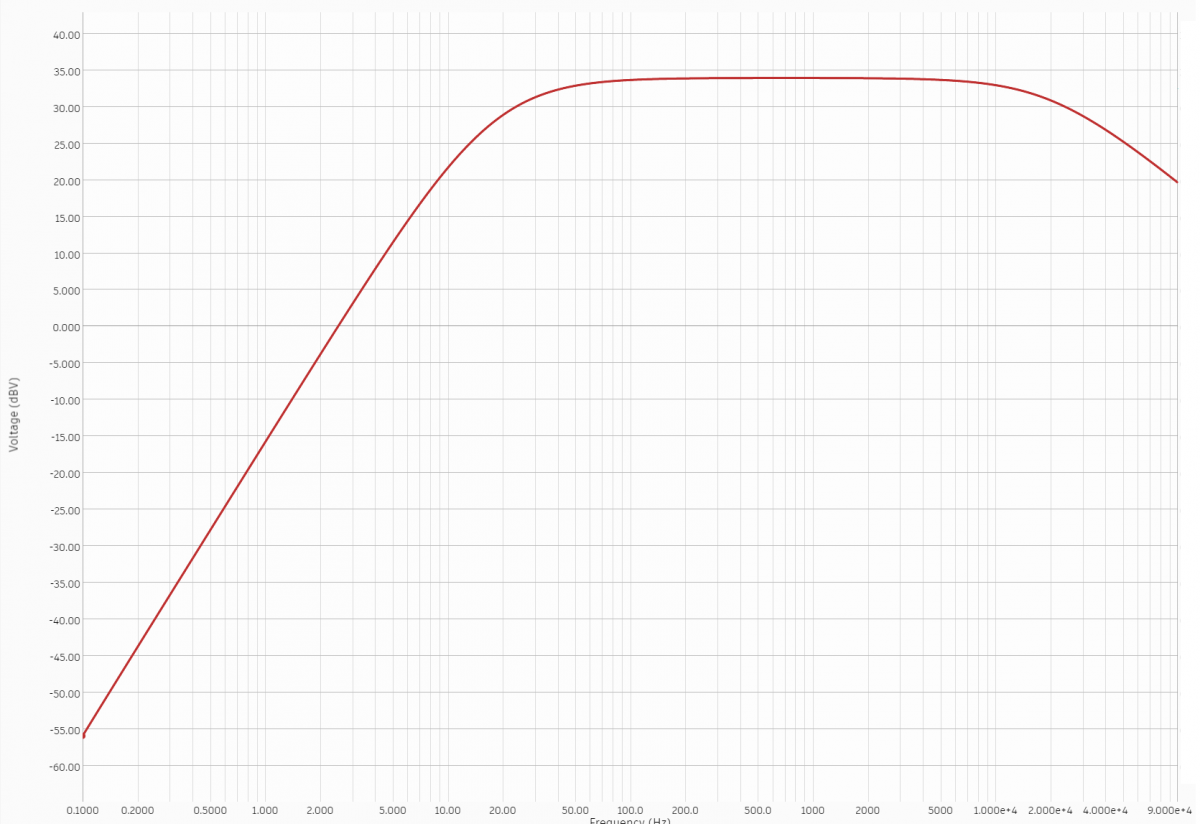
Pour améliorer la qualité du signal enregistré j'utilise un pré-amplificateur/filtre antialiasing ayant les caractéristiques suivantes (c’est celui dont il est question icimais j'ai changé les résistances de 100 kilo Ohm par des résistances de 1 méga Ohm pour adapter l'impédance d'entrée au disque piézo-électrique qui sert de micro) :
- gain de 34 dB +-3dB entre 28 Hz et 19.6kHz
- tension max sortie 3V crête à crête avec une alimentation en 5V.
Voici la courbe de réponses en fréquences du pré-amplificateur tel que simulé dans Eagle :
Voici un détail de l'intérieur où on voit la pile 9V et les ergots de la boîte qui tiennent le support des cartes électroniques :
J'espère bientôt les premiers enregistrements.
Posté par
- 13 janvier 2019 - 02:09
Bonjour à tous et à toutes !
Avant de travailler sur mon sous-marin j'ai réalisé un hydrophone à base d'un disque piézo-électrique et d'un pré-amplificateur. Il marche bien mais je voudrais pousser un peu le concept et enregistrer plutôt qu'écouter en direct. Pour se faire je pense acquérir une carte Adafruit et la connecter à une Arduino (en suivant ce tutoriel).
Cependant, et c'est la que j'aurais besoin de vos conseils avisés, il y a assez peu d'information dans la datasheetdu codec sur la chaîne d'enregistrement : de ce que je comprends il n'y a aucun filtre antialiasing intégré, ni de filtre passe-haut pour supprimer la composante continue. Il n'y a pas non plus de protection contre les surtensions.
Trois solutions s'offrent donc à moi :
Par ailleurs : comment je passe d'une tension alternative (et donc avec des valeurs négatives) à une tension purement positive comme celle que l'entrée ligne accepte ?
Je vous remercie par avance pour vos réponses.
Posté par
- 06 août 2018 - 10:08
plutôt que de fabriquer un réducteur, le mieux serait de faire plusieurs hélices et de voir celle qui marche le mieux tout en consommant le moins d'intensité
Oui c'est un peu ce que je disais dans mon post sur les hélices (ben alors on ne lit pas toute ma prose ! )
J'en ai conçu une (non illustrée) pour la vitesse de 11000 RPM mais elle n'est pas très efficace (30 N de poussée à 11000 RPM en statique contre 60 N à 3100 RPM pour les deux hélices que j'ai montrées). La différence provient de la taille de l'hélice : à 11000 RPM il est conseillé de ne pas dépasser 4,5 cm de diamètre, contre 9 cm à 3100 RPM.
Pour les curieux j'utilise le code Matlab d'Openprop pour concevoir les hélices. C'est bien, surtout, pour un ignorant complet comme moi dans le domaine de l'hydrodynamique. La méthode de simulation qu'il utilise surestime un peu la poussée de l'hélice et sous-estime le couple généré par frottement donc je garde une marge sur la puissance totale (~10 %).
Tu as par ailleurs parfaitement raison au sujet du réducteur. C'est la pire solution qui soit... et en même temps je déteste rester passif devant un problème et la seule solution que je pouvais concevoir en étant loin de chez moi c'est celle-ci  .
.
Dans l'ordre des choses je vais :
- imprimer les différentes hélices et mesurer la poussée statique de chacune à la puissance maximale du moteur, je comparerai ensuite l'efficacité de chacune;
- en cas de résultats décevant ou insuffisant je monterais des moteurs plus puissant (un ami m'a conseillé des brushless de même puissance mais qui tournent deux fois moins vite);
- recourir au réducteur.
Posté par
- 02 août 2018 - 12:00
Alors je viens de tester l'eau et le PLA...
J'ai fait une petite boite, et comme je l'ai poncée avec un solvant, j'ai voulu la rincer à l'eau, et comme le solvant m'a fait quelques marques blanches
je me suis dit "de l'eau chaude et c'est bon"...
ERREUR !
Ma boite ronde qui faisait 60mm de diamètre extérieur et 50mm de diamètre intérieur a perdu plus de 2mm !
Donc éviter l'eau chaude (70° environ)
Ça va le réchauffement climatique n'a pas encore atteint ces températures !
Dans le pire des cas toutes les pièces que j'ai imprimées devront être refaite dans un matériaux plus résistant. Je serai alors dans l'obligation d'avoir recours à un service d'impression car je me refuse à imprimer autre chose que du PLA dans mon 2 pièces mal ventilé. Ce sera pas la fin du monde.
Posté par
- 01 août 2018 - 02:03
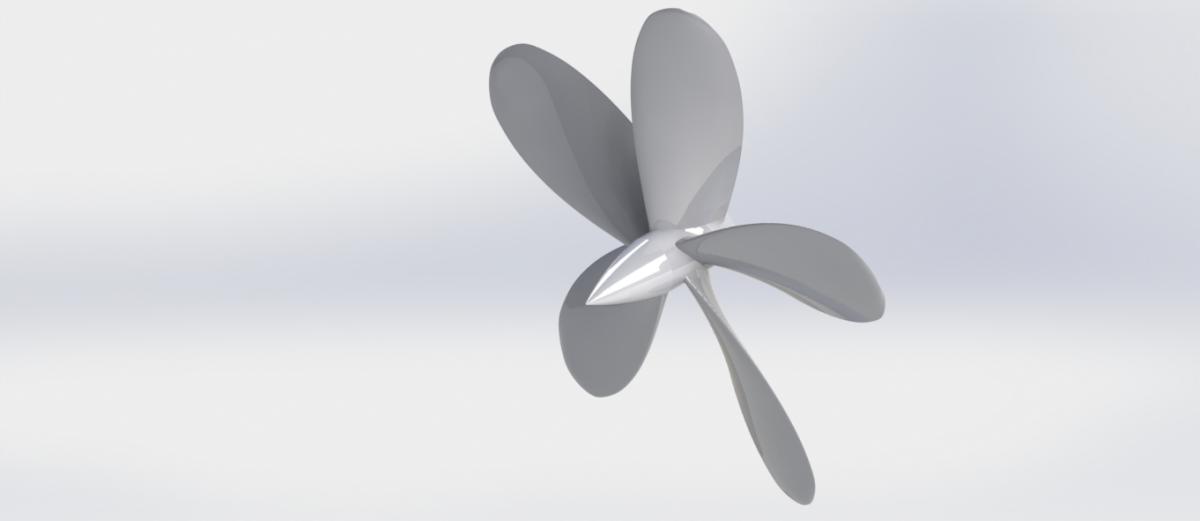
Comme beaucoup je suis en congés loin de chez moi au mois d'aout. Mais cela ne m’empêche pas de travailler un peu sur le sous-marin ! En ce moment je réalise avec Solidworks différent types d'hélices pour remplacer celles que j'ai achetées dans le commerce et qui sont difficiles à trouver.
Voici l'une des hélices que je testerai bientôt :
Hélice plutôt adapté aux grandes vitesses, je n'en attends pas grand chose :
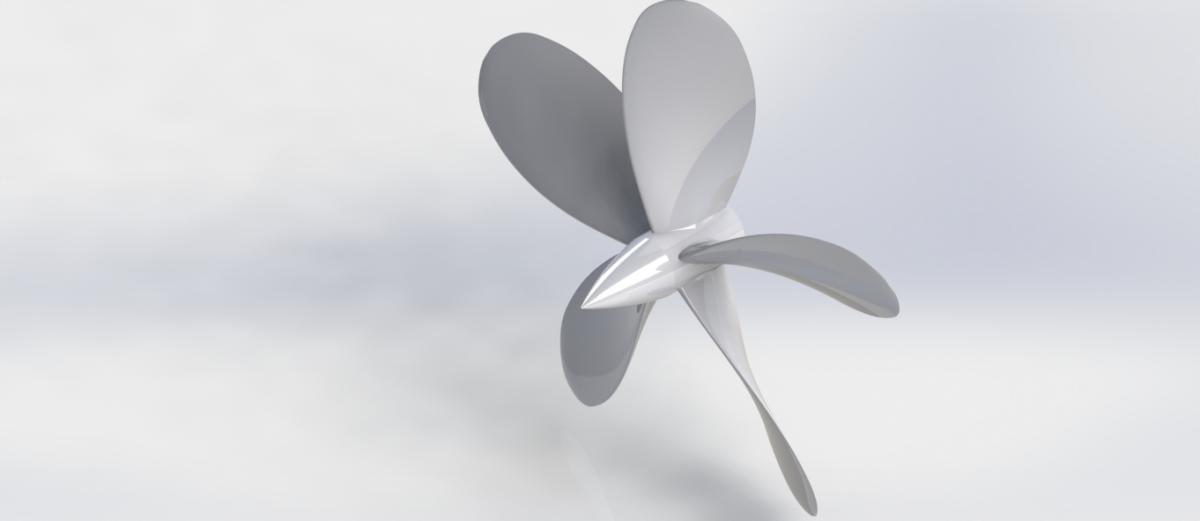
Hélice plutôt adaptée aux petites vitesses, je pense que les tests la donneront gagnantes :
Posté par
- 28 juillet 2018 - 11:55
Un robot capable d'aller me chercher un livre dans ma bibliothèque sans que j'ai à soulever mon auguste derrière.
Un bras robotique ou un UAV d'intérieur avec une caméra pour identifier le livre et me l’apporter pourrait faire l'affaire. Le principal souci du drone c'est la charge utile : certains livres dépassent allégrement les 3 kg.
Posté par
- 07 juillet 2018 - 10:55
J'ai sorti de l'eau aujourd'hui la pièce que j'avais immergée et elle n'est pas déformé. Je vais donc poursuivre la construction avec ma bobine de fil.
Posté par
- 02 juillet 2018 - 08:14
Le décalage en fréquence du à l'effet Doppler peut effectivement diminuer l'efficacité d'un filtre d’auto-corrélation (c'est comme ça qu'on dit en radar dans les livres). Du coup pour maximiser les chances tu multiplies le nombre de filtres pour couvrir toute la bande "recevable".
Tu arrives rapidement à une nombre très important (qui plus est dans un radar tu cherches un signal ponctuel, une impulsion, en plus de tester la corrélation pour toute les vitesses, tu le fais aussi pour toutes les retards (ie distances possibles) ! Je vais citer le Darricau (chapitre 17) :
D’après les considérations précédentes sur l’espacement entre voies distance, l’espacement entre deux voies de corrélation devra être comprise entre 30 et 60 mètres, soit pour un domaine distance couvert de 300 km un nombre de corrélateurs compris entre 5000 et 10 000. De même, d’après les considérations précédentes sur l’espacement entre voies vitesse, l’espacement entre deux filtres vitesse devra être compris entre 20 m/s et 50 m/s, soit pour un domaine vitesse couvert de 1000 m/s un nombre de filtres vitesse par corrélateur compris entre 20 et 40. D’où un nombre total de voies de détection compris entre 100 000 et 400 000, ce qui est considérable pour une réalisation en analogique. Pour cette raison, on a limité l’utilisationde ce type de radar à corrélation à des domaines distance et doppler faibles comme des modes poursuites sur des sondes altimétriques.
source : http://radars-darricau.fr/livre/1-Pages/Sommaire.html
Posté par
- 30 juin 2018 - 09:33
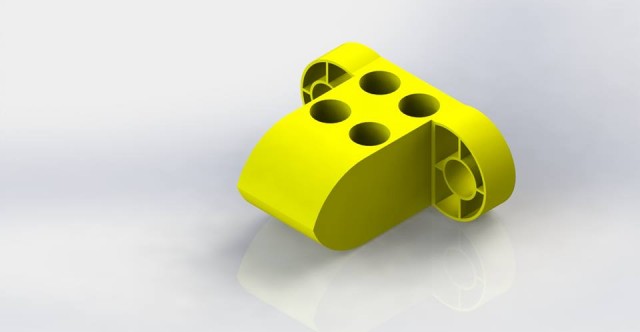
Quelques nouvelles car ce week-end je n'ai pas chômé (enfin c'est surtout mon imprimante qui a travaillé !). Comme je le disais plus tôt ici je n'étais pas satisfait de la fixation des moteurs. Après plusieurs design et quelques heures de réflexions (ajouté à quelques heures d'impressions et quelques jours/semaines d'attentes pour recevoir les pièces) j'ai finalement assemblé aujourd'hui mes nouvelles fixations pour les propulseurs et tout s'assemble très bien !
Le problème était que la pièce était tenue par deux vis dans le tuyaux et que, même serrées à fond, elles laissaient une liberté de rotation au moteur en lacet qui permettait à l'hélice de venir taper contre les bords de la tuyère. Inacceptable donc.
J'ai donc ajouté deux trous dans l'alignement de ceux existants pour contrer cela ! Las cela n'a pas marché (la pièce est visible ci-dessous).

En effet le plastique était trop souple et l'hélice pouvait encore venir taper contre le bord de la tuyère.
Je me suis donc résigné à concevoir une cage qui viendrait fixer le moteur à sa base et le long de son axe et qui remplirait tout le diamètre du tuyau pour éviter tout jeu (accessoirement, ayant déjà percé les tuyaux, cette nouvelle pièce devait utiliser les mêmes fixations).
Et voila le résultat :

Le roulement à billes est doté de deux joints étanches donc j'espère que cela ira.
Posté par
- 26 juin 2018 - 07:25
Merci ! Je me suis attaché pendant le développement à imaginer comment j'allais assembler le sous-marin, de manière à ce qu'un parfait débutant, et non bricoleur qui plus est (comme moi quoi), puisse sans effort le construire. Je suis plutôt satisfait du résultat même si certains choix ne sont finalement pas si éclairé que ça comme, par exemple, le couple hélice/moteur pas si optimal. Mais comme ça remettait profondément en cause le design j'ai décidé de continuer avec. Les fixations des moteurs dans les tuyaux sont également compliquée et vont me demander pas mal de mise au point vu que ma solution initiale ne me satisfait pas.
Et pour répondre à ta question : le premier objectif du projet était éducatif : je voulais apprendre à modéliser en 3D et à réaliser mes propres pièces pour mon imprimante 3D. Comme je n'arrive pas à apprendre sans un support concret je me suis lancé dans un sous-marin. Le projet a pris de l'ampleur par la suite. Maintenant je vise l'exploration à quelques mètres sous la surface (moins de 20 m) des fonds marins méditerranéens (j'ai en effet vu une superbe exposition de photos dans un musée de la région et j'aimerais bien faire pareil !).
Posté par
- 20 juin 2018 - 09:37
Bonjour à tous,
Comme je le disais dans un autre sujet, cela fait deux ans que je travaille à la réalisation d'un sous-marin filoguidé et j'aimerais vous présenter mon projet. Celui-ci se nomme L.Y.S. pour Little Yellow Submarine (comme dans le titre du sujet, c'est fou ça !) à la fois pour la référence (facile) à une chanson bien connue mais aussi parce que j'aimais bien l'acronyme du projet.
Le but de ce sous-marin est de permettre de filmer et d'écouter en temps réel ce qui se passe à quelques mètres sous la surface. Accessoirement j'espère pouvoir expérimenter avec l'hydrophone que j'ai fabriqué.
Voici les règles que je me suis fixé pour mon projet :
- le coût final des pièces détachées utilisés pour le sous-marin ne doit pas dépasser les 300 €;
- le sous-marin doit emporter une caméra frontale et envoyer la vidéo en temps réel à l'opérateur;
- le sous-marin doit remonter à la surface seul en cas de panne totale de l’électronique de bord.
Après des heures de modélisation j'ai finalisé la conception et les plans : voici quelques rendus des différentes solutions qui ont traversé mon esprit :
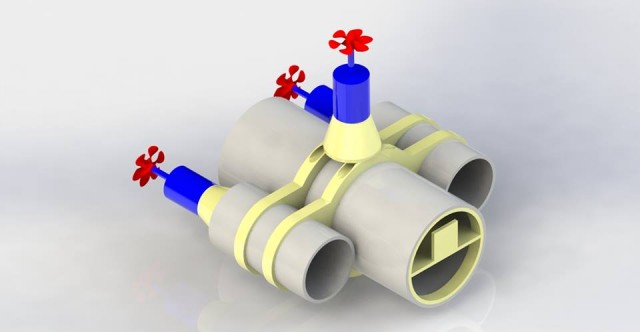
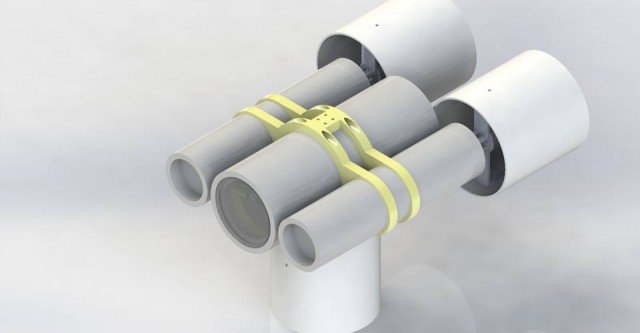
Et voici la modélisation finale :
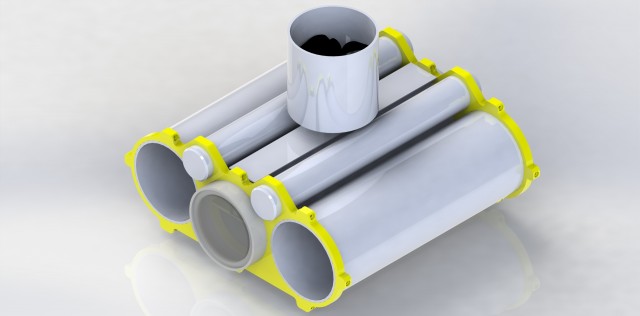
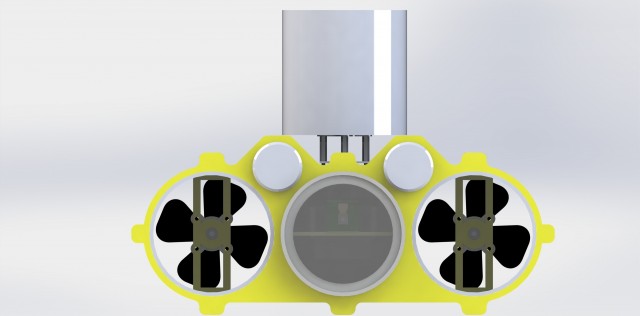
La construction :

La première image de la caméra avec l'incrustation vidéo :
La solution définitive repose sur l'utilisation de trois moteurs brushless outrunner dont les bobines profiteront d'un traitement anti-corrosion et qui se situent à l'extérieure du compartiment étanche. Les câbles d'alimentations et le câble ethernet (pour les échanges avec l'opérateur en surface) passeront par la cloison à l'arrière du tube central.
L'étanchéité est garantie par des presses-étoupes de piscine.
Les pièces reliant les différents tubes entre eux sont imprimés en 3D par mon imprimante.
L'électronique à bord est constituée d'une Raspberry Pi 3. Elle gère la vidéo et les signaux PWM qui sont envoyés à un régulateur de drone quadricopter. Celui-ci assure également la régulation de l'alimentation électrique.
Le tout est alimenté par une batterie LiPo 4S, 5800 mAh.
La caméra est une raspicam. Je ne compte l'utiliser que pour fournir le flux vidéo en directe. L'enregistrement se fera à l'aide d'une GoPro.
Les moteurs sont des brushless outrunner Turnigy d'une puissance de 200 W (700 kV).
Les hélices sont des Graupner quadripales de 88 mm de diamètre.
Je ne travaille sur ce projet que pendant mes (rares) heures de loisirs et la construction avance lentement.
J'espère que vous trouverez ce projet intéressant et n'hésitez pas à me faire part de vos remarques, questions et suggestions.




