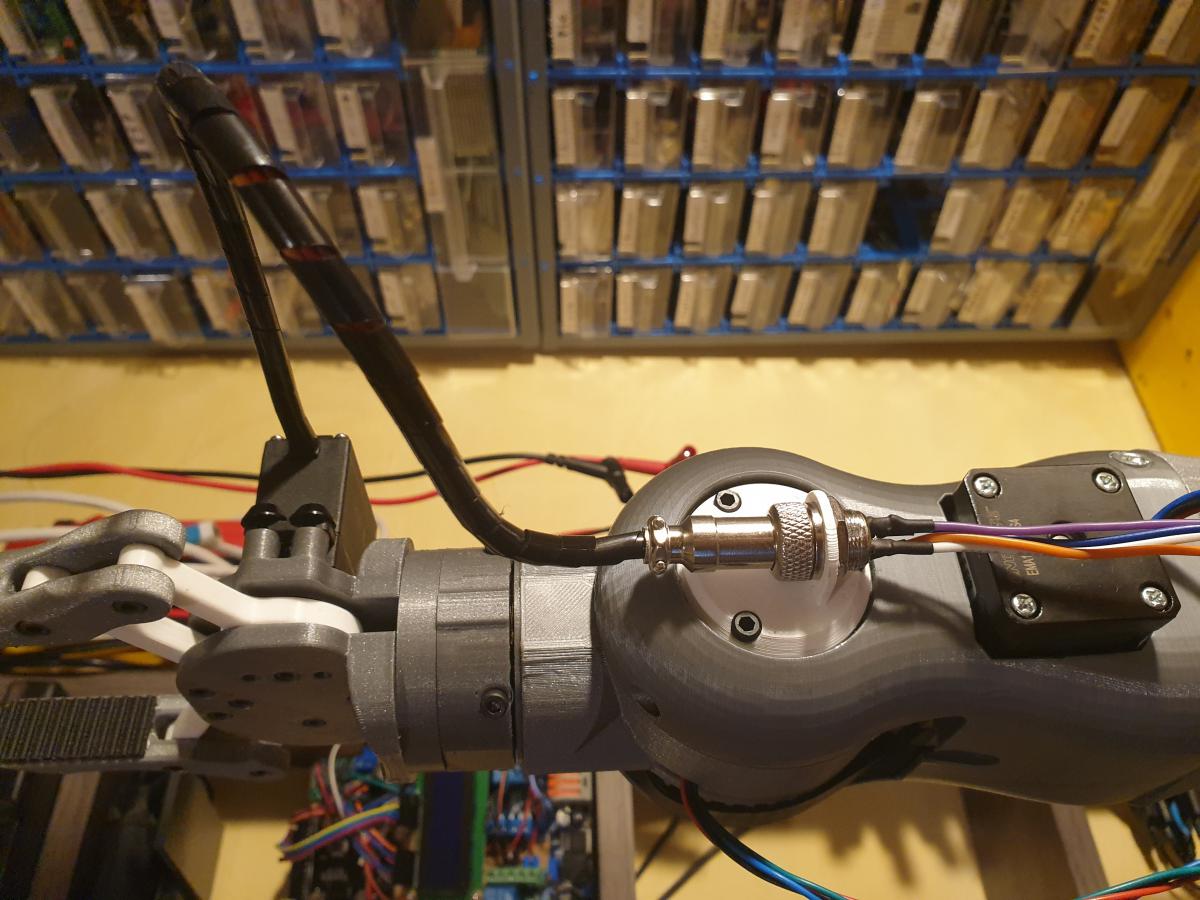
Le bras est complètement assemblé
Prochainement je vais câbler les drivers sur l'arduino mega et faire le cable management sur le bras
Je réfléchis également à une base
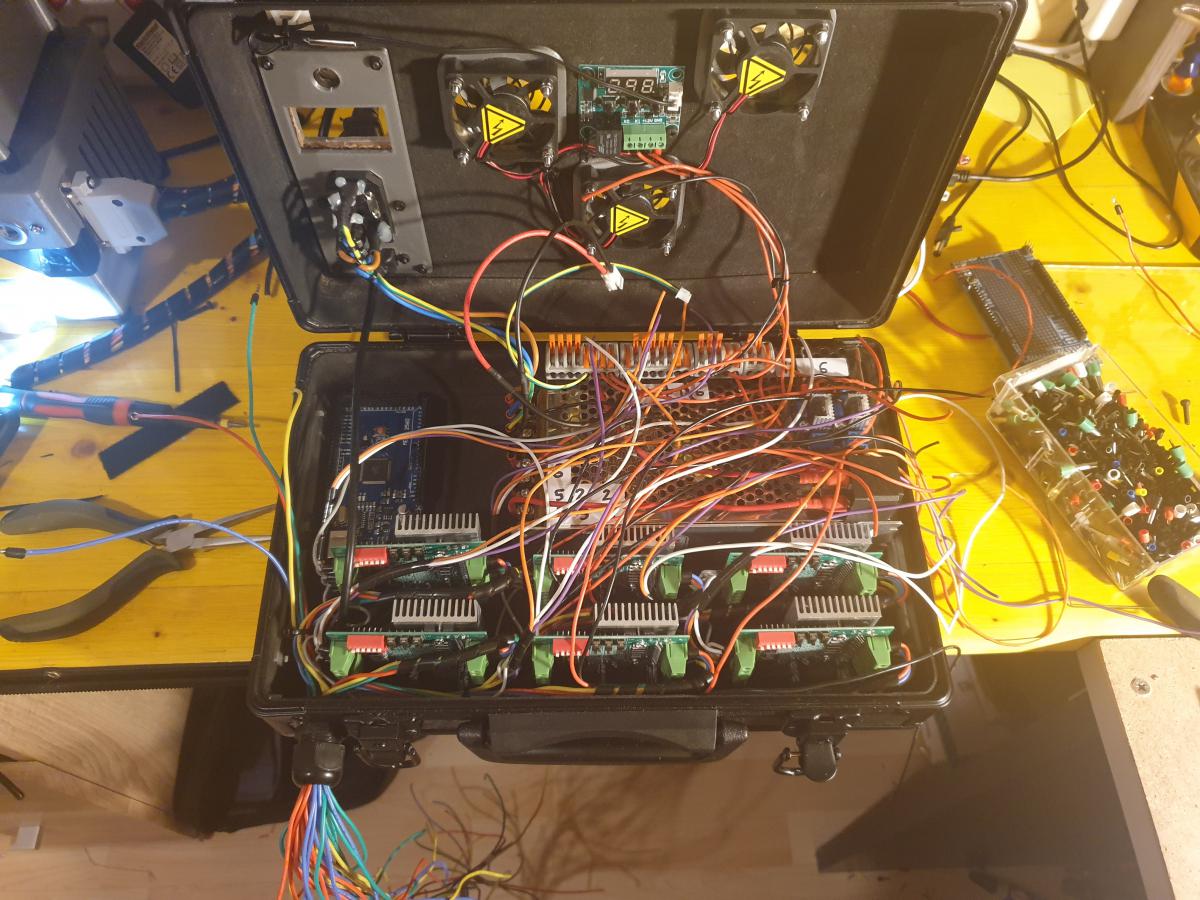
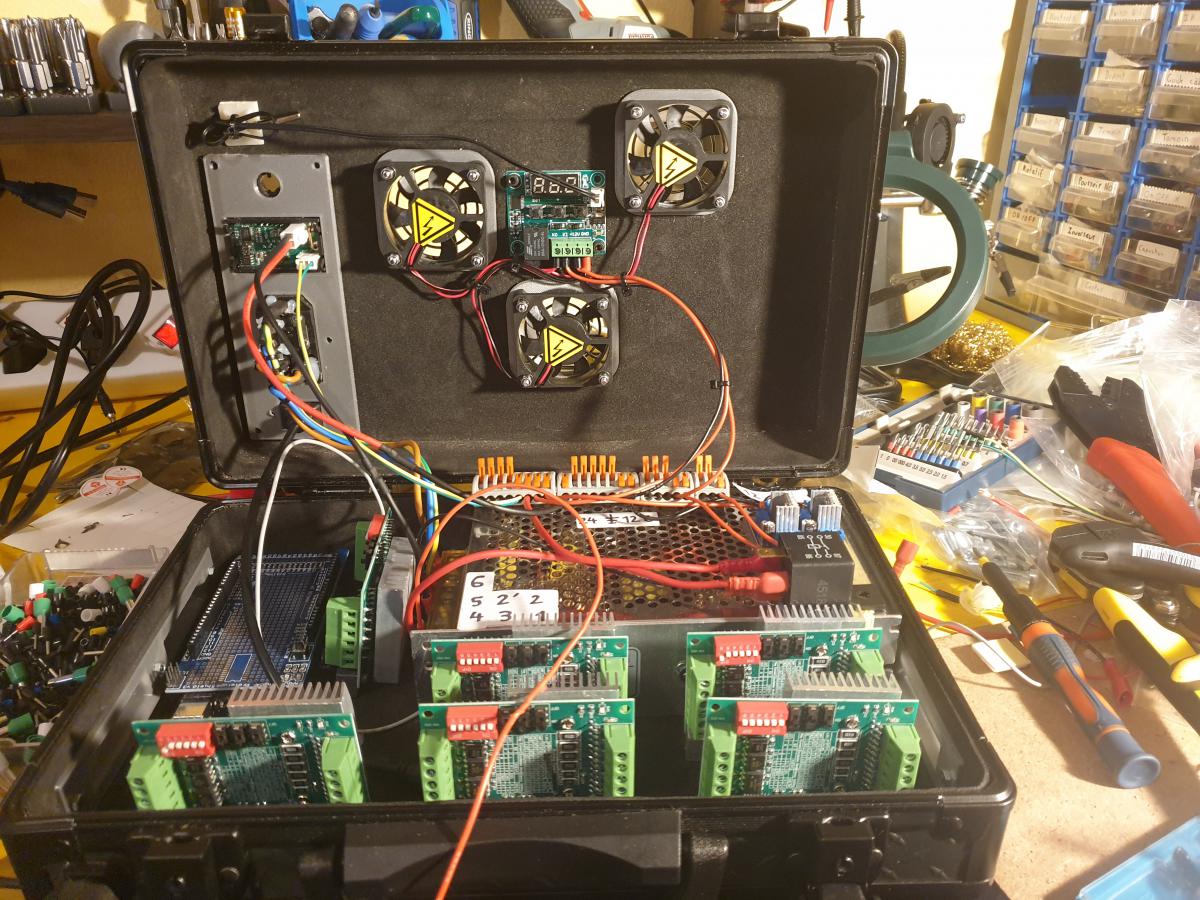
Avancée de la malette...
J'attend toujours un driver de Chine les transports sont trèèèèèèès lent ces temps.
J'attend également un coupleur 8-8 et un poussoir avec temoin 24v
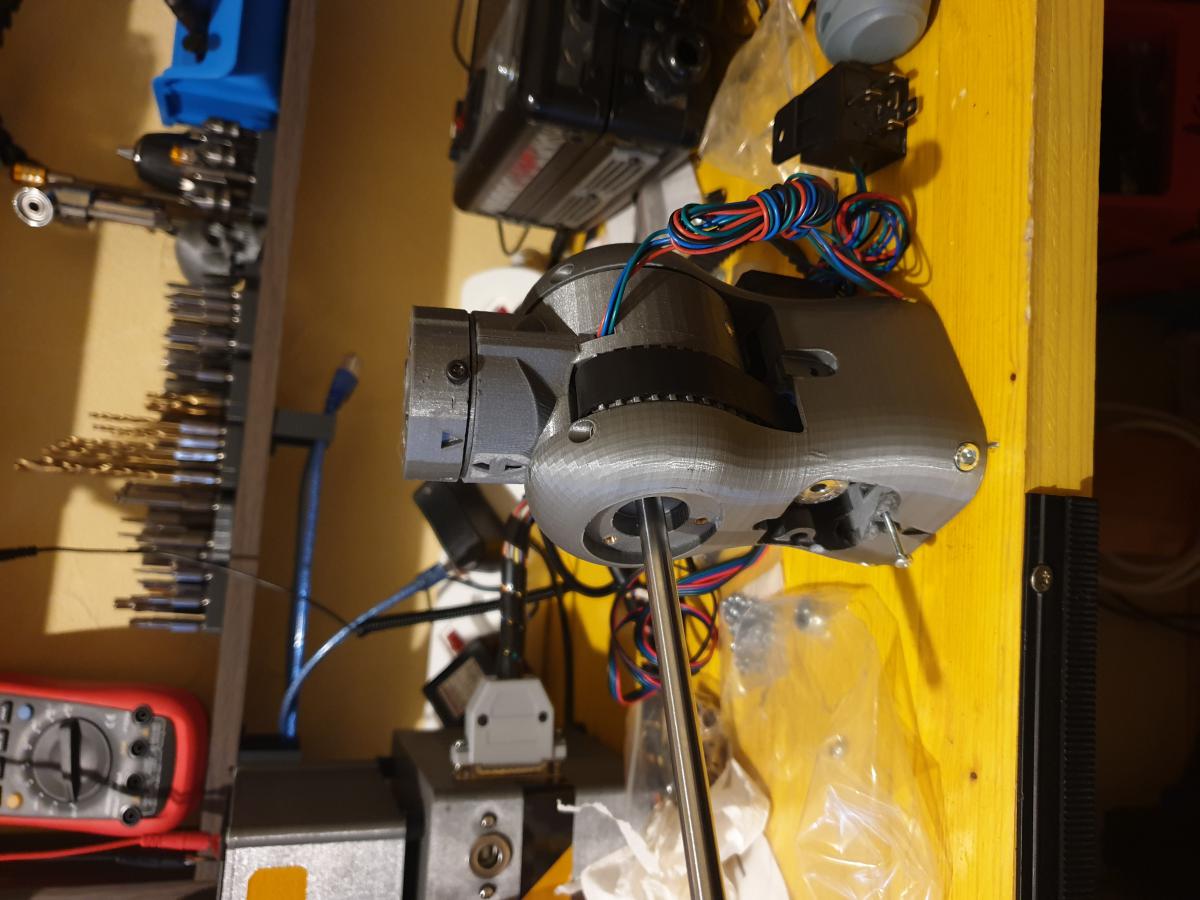
Une photo du poignet avec le degré de liberté supplémentaire et le nema 14 à l'intérieur...
J'attend quelques bricoles de Chine pour pouvoir terminer l'assemblage

 Mon contenu
Mon contenu Homme
Homme






 Posté par
- 08 juillet 2019 - 06:36
Posté par
- 08 juillet 2019 - 06:36