Mon contenu
Mon contenu Homme
Homme

 Posté par
Posté par Re-bienvenue, Fabien ! Ca c'est du come-back!
Oui, moi aussi, je suis toujours présent sur ce forum, mais vraiment en pointillés. J'attends de voir comment cette communauté évolue.
Je ne ferais pas de commentaire sur tes coups de gueule, je crois que tu sais déjà ce que j'en pense.
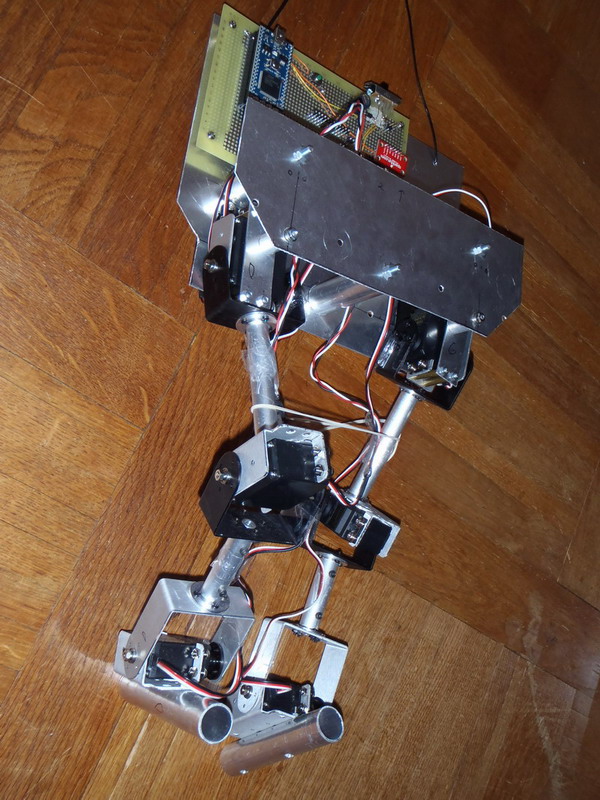
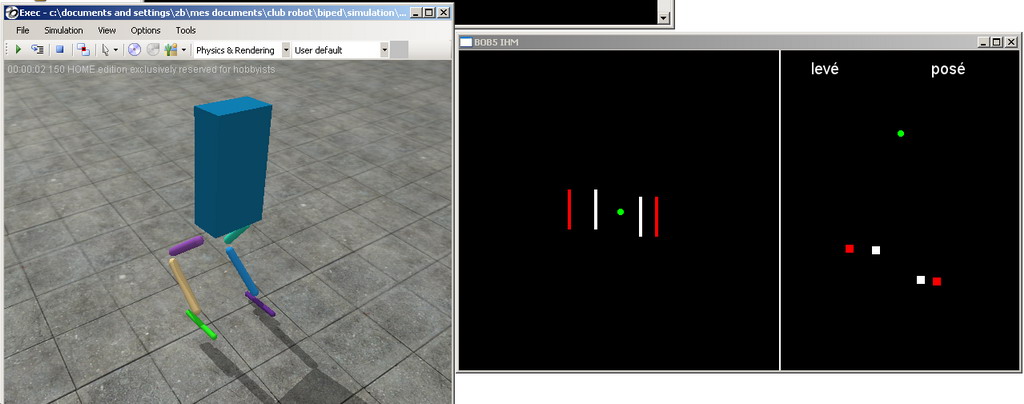
Sinon, il faut quand même que je te remercie une nouvelle fois : c'est grâce à Thot et à toi que j'ai eu l'idée de me lancer dans l'étude de la marche bipède. C'est vous 2 qui m'avez refilé le virus. Je n'en suis qu'au tout début des travaux, mais ça s'annonce passionnant!
Pour finir, je suis agréablement surpris de voir que vous fabriquez un humanoïde taille bambin, car tu ne jurais que par des humanoïdes taille adulte il y a quelques années. Bonne chance dans la continuation de l'aventure. J'ai toujours du respect pour ceux qui arrivent à entreprendre et à vivre de leur passion.
Et j'attends avec impatience de voir les premiers pas d'un de vos robots.
Leon.
- Prinz metal ex-neo aime ceci