
 Mon contenu
Mon contenu Homme
Homme






Depuis que j'ai fait une mise à jour de mon Arduino Nano, je suis obligé de sélectionner ATMega328P(old Bootloader), sinon lors du téléversement/compilation d'un programme j'ai une erreur du type:
"Une erreur est survenue lors du transfert du croquis
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x00
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x00
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x00"
Intuitivement, je me dis que le old Bootloader n'est pas plus performant que le nouveau.
Quelqu'un a une idée ?
#100986 Problème de bootloader Arduino
 Posté par
- 22 décembre 2018 - 07:56
Posté par
- 22 décembre 2018 - 07:56
#100976 Localisation par triangulation
Posté par
- 22 décembre 2018 - 01:58
Pourrais-tu nous donner un lien ?de plus j'ai trouvé sur le net, un tuto permettant de récupérer le signal reçu par un talkie-walkie
pour l'utiliser avec une Arduino uno.
- Manel aime ceci
#100962 Et vous votre atelier ressemble à quoi ?
Posté par
- 21 décembre 2018 - 08:04
C'est une bonne idée, les caissons standards ne sont pas très chers et permettent une grande modularité.Moi pour mon atelier je pensais partir sur une cuisine avec ilot central, mais sans les équipements, vous en pensez quoi ?
J'ai eu ça pendant un moment. Les portes ne sont pas nécessaires, au contraire elles peuvent gêner pour la vue d'ensemble.
Par contre, je conseille plutôt des caissons de 40cm de profondeur pour le bas, sur lesquels tu pourras mettre un plan de travail de 60cm de profondeur.
Cela ménagera de l'espace pour tes jambes, tu pourras t'assoir sur un tabouret, et pourra te servir d'établi.
- Oliver17 aime ceci
#100948 Mini robot pour explorer de petites cavités
Posté par
- 20 décembre 2018 - 06:17
Magnifique !
La seule chose qui me vient à l'esprit, c'est que peut-être que 3 chenilles, réparties en 120°, au lieu de 4, équilibreraient mieux la "souris" et allègerait la motorisation.
Quelles dimensions, cette "souris" ?
La seule chose qui me vient à l'esprit, c'est que peut-être que 3 chenilles, réparties en 120°, au lieu de 4, équilibreraient mieux la "souris" et allègerait la motorisation.
Quelles dimensions, cette "souris" ?
- neobish aime ceci
#100921 Kit pour programmer en ROS
Posté par
- 19 décembre 2018 - 02:38
Si tu veux vraiment rester sur l'EV3, il y a également tout le monde EV3Dev où tu peux programmer en C, Python et surement d'autres langages.
https://www.ev3dev.org/
https://sites.google...e/ev3devpython/
https://github.com/e...dev-lang-python
https://www.ev3dev.org/
https://sites.google...e/ev3devpython/
https://github.com/e...dev-lang-python
- pmdd aime ceci
#100911 Utiliser la batterie du vieux NXT dans l'EV3
Posté par
- 19 décembre 2018 - 10:47
Bon, je balance.J'ai vu ton dernier post. A ta place, je le traduirais en anglais...Tu cherches les ennuis, là, quand même.



Pouvez pas comprendre...

Pmdd a fait un post en français sur le forum Eurobricks, ce qui est strictement interdit ! English mandatory !!!
Non, je crois pas. C'est bien trouvé.Je suppose que c'est connu mais je ne l'avais jamais utilisée.
- pmdd aime ceci
#100883 Chenilles
Posté par
- 18 décembre 2018 - 08:10
J'ai fait pas mal d'essais pour les chenilles. Par exemple, le tapis de vaisselle pour un petit robot d'intérieur est très bien.
J'ai également utilisé du grillage plastique dans lequel j'ai tressé du joint D.
Enfin, plein de choses.
Mais pour moi, le gros problème, c'est de faire les éléments qui doivent guider le barbotin et les roulements.
C'est là, la difficulté. D'où, l'intérêt de l'impression 3D.
J'ai également utilisé du grillage plastique dans lequel j'ai tressé du joint D.
Enfin, plein de choses.
Mais pour moi, le gros problème, c'est de faire les éléments qui doivent guider le barbotin et les roulements.
C'est là, la difficulté. D'où, l'intérêt de l'impression 3D.
- Forthman aime ceci
#100873 Lego - Arduino Kame Quadruped
Posté par
- 17 décembre 2018 - 11:54
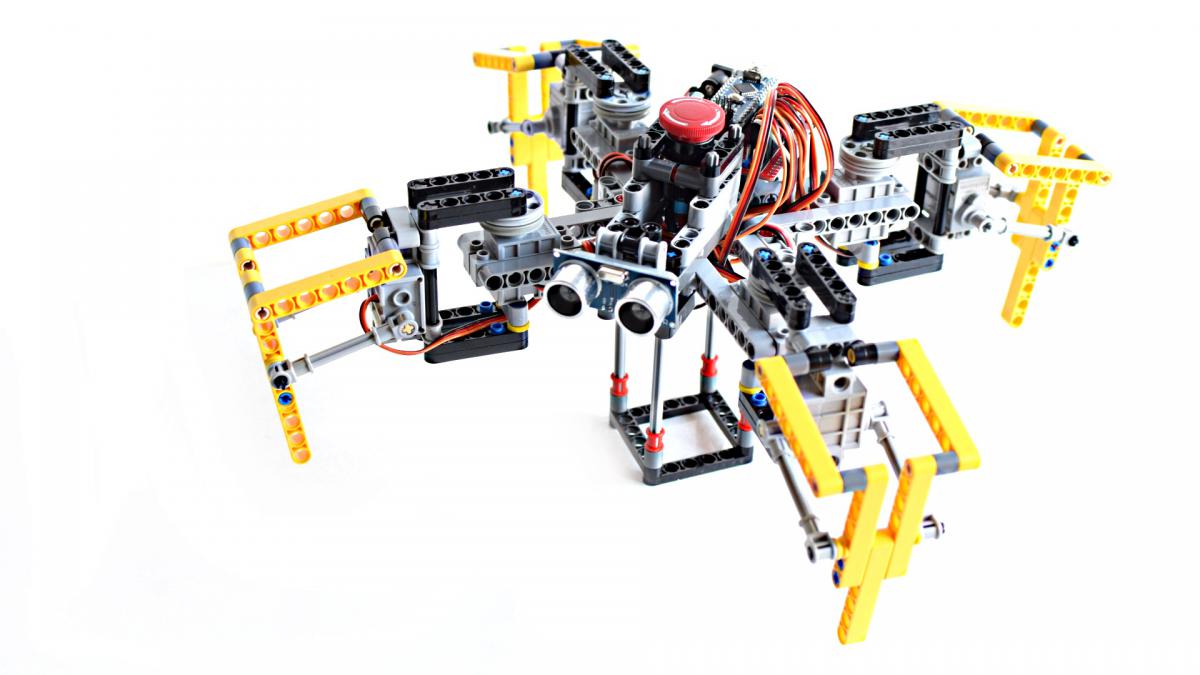
Voici quelques nouvelles de Kame.
J'ai complètement repensé la structure qui était trop étroite.
Les servos sont de bonne qualité. Ils maintiennent leur position et je n'ai pas réussi à bouger le palonnier à la main, sans aller au delà du raisonnable bien sûr. Je ne tiens pas à en briser un.
Malheureusement, leur déplacement physique est de 270°, alors que le déplacement électronique est bien de 180°.
Cela a eu pour conséquence des débattements désordonnés et quelques sueurs froides. D'où la présence d'un bouton d'arrêt d'urgence.
Autre bizarrerie, hors connexion, on peut faire tourner le palonnier en rotation continue, alors qu'ils ne sont pas prévus pour cela.
En attendant ma petite batterie, je lui fais faire des mouvements sur un piédestal. Le code n'est vraiment pas bien documenté et je me demande si je ne vais pas écrire le mien. Le problème, c'est que cela me prendra beaucoup de temps.
Mon objectif avec cette réalisation est d'avoir quelque chose qui fonctionne "rapidement" et d'extrapoler vers quelque chose de plus grand ou tout du moins de plus ambitieux.
Je trouve la programmation de l'Arduino très contraignante avec le cable USB, l'obligation d'arréter le programme manuellement.
Rien à voir avec le confort de l'EV3.
Cliquez moi.
J'ai complètement repensé la structure qui était trop étroite.
Les servos sont de bonne qualité. Ils maintiennent leur position et je n'ai pas réussi à bouger le palonnier à la main, sans aller au delà du raisonnable bien sûr. Je ne tiens pas à en briser un.
Malheureusement, leur déplacement physique est de 270°, alors que le déplacement électronique est bien de 180°.
Cela a eu pour conséquence des débattements désordonnés et quelques sueurs froides. D'où la présence d'un bouton d'arrêt d'urgence.
Autre bizarrerie, hors connexion, on peut faire tourner le palonnier en rotation continue, alors qu'ils ne sont pas prévus pour cela.
En attendant ma petite batterie, je lui fais faire des mouvements sur un piédestal. Le code n'est vraiment pas bien documenté et je me demande si je ne vais pas écrire le mien. Le problème, c'est que cela me prendra beaucoup de temps.
Mon objectif avec cette réalisation est d'avoir quelque chose qui fonctionne "rapidement" et d'extrapoler vers quelque chose de plus grand ou tout du moins de plus ambitieux.
Je trouve la programmation de l'Arduino très contraignante avec le cable USB, l'obligation d'arréter le programme manuellement.
Rien à voir avec le confort de l'EV3.
Cliquez moi.
#100832 [Char] Exploration vide sanitaire
Posté par
- 16 décembre 2018 - 10:29
C'est vrai que les vides sanitaires servent très souvent de dépotoir de chantier et que le terrain y est souvent très accidenté.
Indépendamment des problèmes d'étanchéité, je voudrais te montrer ce qu'un petit char, avec de bonnes chenilles, est capable de faire sur ce type de terrain.
Indépendamment des problèmes d'étanchéité, je voudrais te montrer ce qu'un petit char, avec de bonnes chenilles, est capable de faire sur ce type de terrain.
- Forthman aime ceci
#100829 Des exemples de robots quadrupèdes
Posté par
- 16 décembre 2018 - 08:06
Voici quelques exemples de quadrupèdes utilisant des pattes en "losange".
L'avantage de cette technique, qui a l'air d'avoir de plus en plus d'adeptes, est qu'elle remonte la motorisation au niveau du bassin.
Ainsi, on a pas le poids du moteur au niveau du genou.
L'avantage de cette technique, qui a l'air d'avoir de plus en plus d'adeptes, est qu'elle remonte la motorisation au niveau du bassin.
Ainsi, on a pas le poids du moteur au niveau du genou.
- Oliver17 aime ceci
#100812 Fusion 360 - par Autodesk - Modélisation et animation
Posté par
- 15 décembre 2018 - 07:38
Encore un nouveau tutorial me direz vous ! C'est vrai, mais celui là est d'Autodesk Education, et en français s'il vous plait !
Ce tutorial est constitué de 22 vidéos.
Le lien vers l'ensemble du tutorial, https://www.youtube....vMwwuiOQ1H8pLFk
La première vidéo:
Ce tutorial est constitué de 22 vidéos.
Le lien vers l'ensemble du tutorial, https://www.youtube....vMwwuiOQ1H8pLFk
La première vidéo:
#100765 Vis sans fin ou crémaillère ?
Posté par
- 12 décembre 2018 - 03:25
Comme tu peux le voir sur la dernière image de ce post, https://www.robot-ma...riable/?p=87738j'ai utilisé plusieurs petits pignons.
Là, tout était bloqué avec aucun jeu. J'utilise un gros servo avec un petit pignon couplé à un grand pignon. Tu devrais retrouver le montage assez facilement.
Là, tout était bloqué avec aucun jeu. J'utilise un gros servo avec un petit pignon couplé à un grand pignon. Tu devrais retrouver le montage assez facilement.
- pmdd aime ceci
#100743 Vis sans fin ou crémaillère ?
Posté par
- 11 décembre 2018 - 09:42
J'ai un peu traité le sujet, ici https://www.robot-ma...riable/?p=80209
Il ya quelques temps, j'étais à fond pour la vis, mais dans la pratique, j'ai constaté que la crémaillère était d'une mise en oeuvre nettement plus efficace.
Il ya quelques temps, j'étais à fond pour la vis, mais dans la pratique, j'ai constaté que la crémaillère était d'une mise en oeuvre nettement plus efficace.
- pmdd aime ceci




