

 Mon contenu
Mon contenu Non spécifié
Non spécifié
Messages que j'ai postés
Dans le sujet : ROBY AVEC UN SERVO TETE
25 janvier 2012 - 12:03
#include <Servo.h>
#define AVANT 1
#define ARRIERE 0
#define GAUCHE 2
#define DROITE 3
#define SERVOG 1
#define SERVOD 0
#define UPDDG 3
#define UPDDD 4
#define VMAX 5
Servo servog;
Servo servod;
int getNeutral(int s)
{
if(s == SERVOG)
return 86;
else
return 84;
}
void handleS(int s, int speed)
{
//Vitesse :
// 0 -> 0; 1 -> 1; 2 -> 3; 3 -> 8; 4 -> 10; v => 5 -> 30
int tab[6] = {0,1,3,8,10,30};
int pos = getNeutral(s);
int acc;
if (speed < 0)
acc = - tab[abs(speed)];
else
acc = tab[speed];
if(s == SERVOG)
servog.write(pos += acc);
else
servod.write(pos -= acc);
}
void move(int direction)
{
int m1 = 0, m2 = 0;
switch(direction)
{
case DROITE: m1 = 1; m2 = -1; break;
case GAUCHE: m1 = -1; m2 = 1; break;
case AVANT: m1 = 1; m2 = 1; break;
case ARRIERE: m1 = -1; m2 = -1; break;
}
handleS(SERVOG, m1*VMAX);
handleS(SERVOD, m2*VMAX);
}
void handleUPDD(int updd)
{
if(digitalRead(updd) == HIGH)
{
move(ARRIERE);
delay(500);
if (updd == UPDDG)
{
move(DROITE);
}
else
{
move(GAUCHE);
}
delay(800);
}
}
void setup()
{
pinMode(UPDDG, INPUT);
pinMode(UPDDD, INPUT);
servog.attach(10);
servod.attach(9);
move(AVANT);
}
void loop()
{
handleUPDD(UPDDG);
handleUPDD(UPDDD);
move(AVANT);
delay(15);
}
voila pour mon code
et pour le schemas le voila
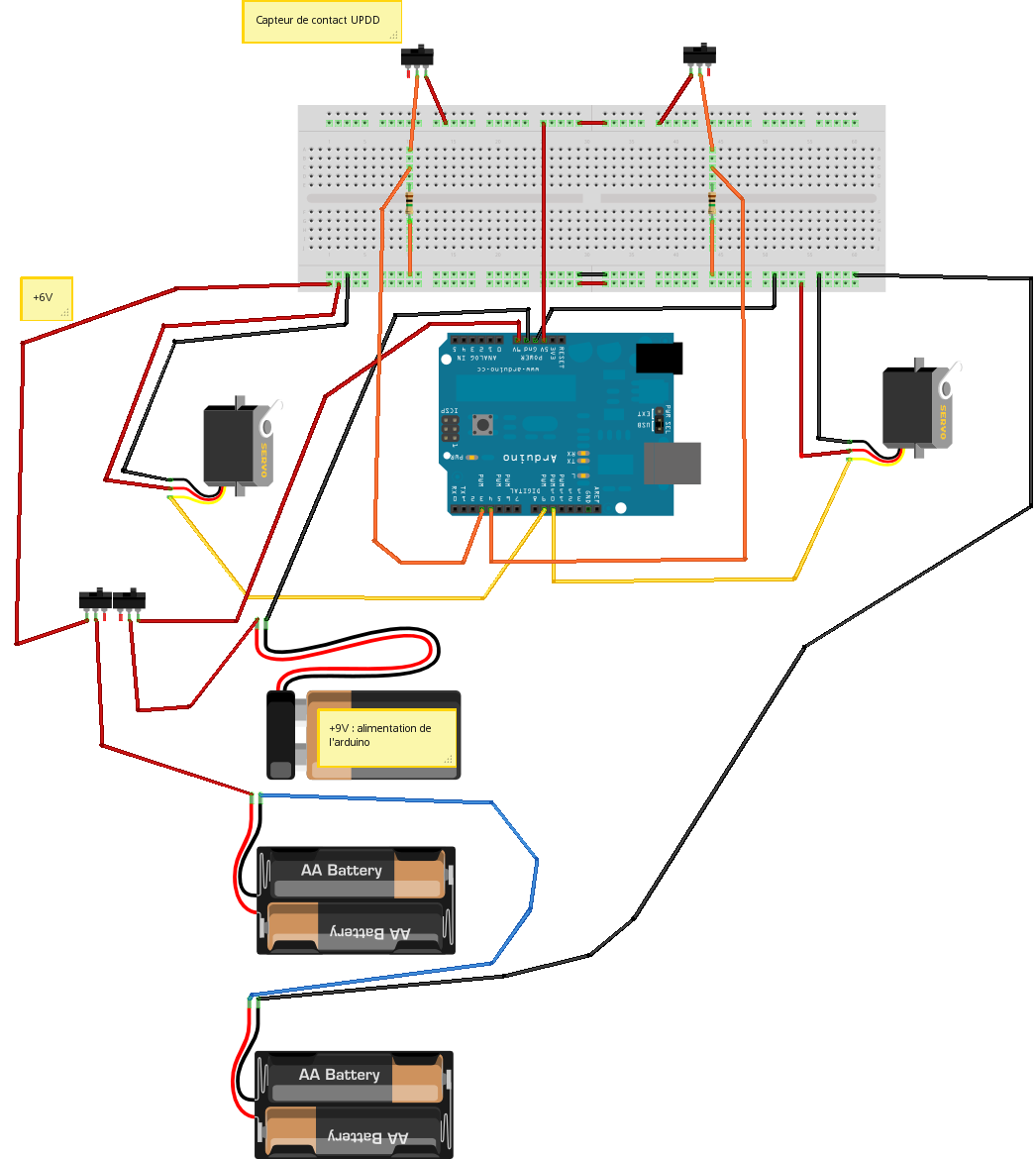
voila je compte sur votre générositer pour m'aidé dans mon projet cordialement.
#define AVANT 1
#define ARRIERE 0
#define GAUCHE 2
#define DROITE 3
#define SERVOG 1
#define SERVOD 0
#define UPDDG 3
#define UPDDD 4
#define VMAX 5
Servo servog;
Servo servod;
int getNeutral(int s)
{
if(s == SERVOG)
return 86;
else
return 84;
}
void handleS(int s, int speed)
{
//Vitesse :
// 0 -> 0; 1 -> 1; 2 -> 3; 3 -> 8; 4 -> 10; v => 5 -> 30
int tab[6] = {0,1,3,8,10,30};
int pos = getNeutral(s);
int acc;
if (speed < 0)
acc = - tab[abs(speed)];
else
acc = tab[speed];
if(s == SERVOG)
servog.write(pos += acc);
else
servod.write(pos -= acc);
}
void move(int direction)
{
int m1 = 0, m2 = 0;
switch(direction)
{
case DROITE: m1 = 1; m2 = -1; break;
case GAUCHE: m1 = -1; m2 = 1; break;
case AVANT: m1 = 1; m2 = 1; break;
case ARRIERE: m1 = -1; m2 = -1; break;
}
handleS(SERVOG, m1*VMAX);
handleS(SERVOD, m2*VMAX);
}
void handleUPDD(int updd)
{
if(digitalRead(updd) == HIGH)
{
move(ARRIERE);
delay(500);
if (updd == UPDDG)
{
move(DROITE);
}
else
{
move(GAUCHE);
}
delay(800);
}
}
void setup()
{
pinMode(UPDDG, INPUT);
pinMode(UPDDD, INPUT);
servog.attach(10);
servod.attach(9);
move(AVANT);
}
void loop()
{
handleUPDD(UPDDG);
handleUPDD(UPDDD);
move(AVANT);
delay(15);
}
voila pour mon code
et pour le schemas le voila
voila je compte sur votre générositer pour m'aidé dans mon projet cordialement.




