

 Mon contenu
Mon contenu Homme
Homme





- RobertMok aime ceci
#68599 Propositions d'améliorations:
 Posté par
- 06 avril 2016 - 09:25
Posté par
- 06 avril 2016 - 09:25
Ok^^ après c'est pas vitale non plus!
#68082 Robot Quadrupède intelligent.
Posté par
- 19 mars 2016 - 01:38
Question: ça intéresse des personnes un sujet dédié aux caméras filaires pour faire du traitement d'image dans leur projet robotique (j'en vois pas beaucoup qui en inclus) ? J’hésite à faire une rafale de commande de cameras pour les tester et une réponse ici pourrait m'aider.
- Oliver17 aime ceci
#67734 Retour vidéo pour nos robots télé-opéré
Posté par
- 04 mars 2016 - 09:55
Concernant la vision 3d il y a aussi une camera intéressante, la ps4eye!
-Bonne qualité d'image.
-Grand angle sans trop de déformation apparemment.
-Elle monte à 240fps (avec un bon processeur pour le traitement d'image).
-Écart entre les 2 objectifs vers 8cm.
-Les 2 images sont synchronisées.
-Le prix, 50 environ.
-Elle dispose de 4 micros, si on veut développer des applications audios.
Une image qui montre la taille de l'électronique par rapport au boîtier:

Elle est dans ma liste de caméra à tester
-Bonne qualité d'image.
-Grand angle sans trop de déformation apparemment.
-Elle monte à 240fps (avec un bon processeur pour le traitement d'image).
-Écart entre les 2 objectifs vers 8cm.
-Les 2 images sont synchronisées.
-Le prix, 50 environ.
-Elle dispose de 4 micros, si on veut développer des applications audios.
Une image qui montre la taille de l'électronique par rapport au boîtier:
Elle est dans ma liste de caméra à tester
#67557 Robot Quadrupède intelligent.
Posté par
- 27 février 2016 - 02:05
Bonne nouvelle ! Tout a l'air de fonctionner ! 
J'ai isoler Ry avec la nouvelle expression de Rx et finalement ça ne change qu'une addition en soustraction (celle que je montre du doigt). J'ai fait une vidéo qui montre l'ensemble:
Par contre sur mon pc portable je tombe à 5fps, j'en veux beaucoup plus ! ^^
- Path aime ceci
#66326 Robot Quadrupède intelligent.
Posté par
- 16 décembre 2015 - 04:39
J'ai testé un moteur + réducteur de chez Banebots, le rs775 réduit 64x. Beaucoup de force et de vitesse, mais un jeu de 1 à 2 degrés sur l'arbre de sortie.. et c'est visiblement un jeu que l'on retrouve souvent sur ce type de réducteur, un vrai casse tête.
Concernant le moteur, il semble bien construit et coupleux. Il tourne dés 0.8V, un petit jeu sur l'arbre dans la direction de l'axe mais rien d'anormal, et son rendement monte à 77% ! (ça reste un brushed)
Je l'ai piloté avec un pwm+mosfet et j'ai regardé sa tension: gros pique de tension au début, parasite des charbons bien visible, et ça se retrouve dans la tension de l'alim (le gros pique surtout).
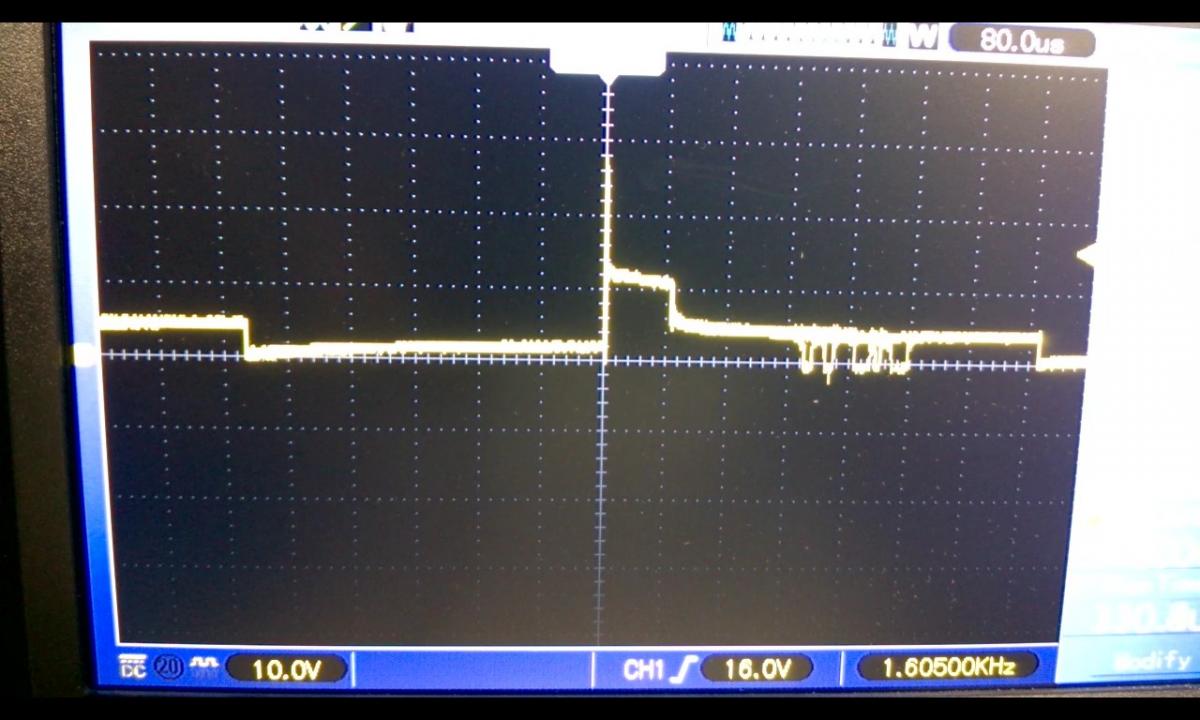
Du coup j'ai tout filtré avec 2 condo+diode. J'ai aussi testé un rodage d'une bonne demi heure en soufflant de temps en temps sur les charbons, mais à 12V il y a autant de parasites et détincelles.
Coté vision j'ai reçu des objectifs 2.8mm f1.2, c'est trés lumineux et ca donne 120 degrés de champs de vision. J'ai aussi retiré le filtre ir!
voila ce que ça donne avec seulement une petite ampoule à filament -> https://www.youtube....eature=youtu.be
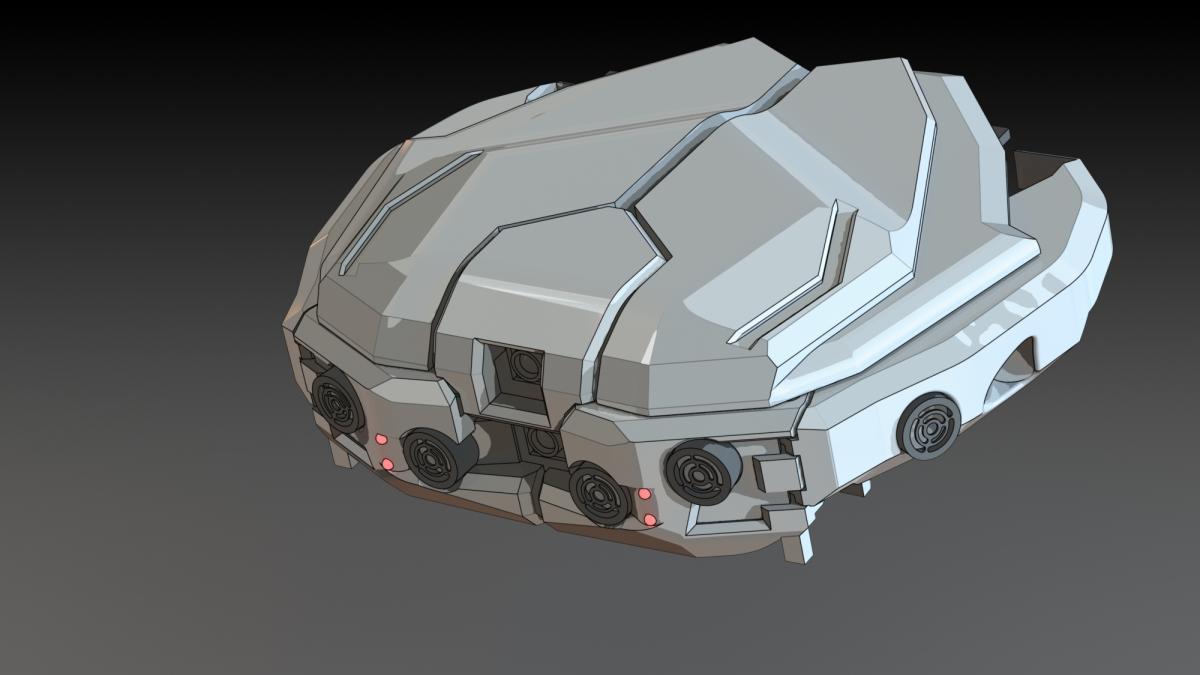
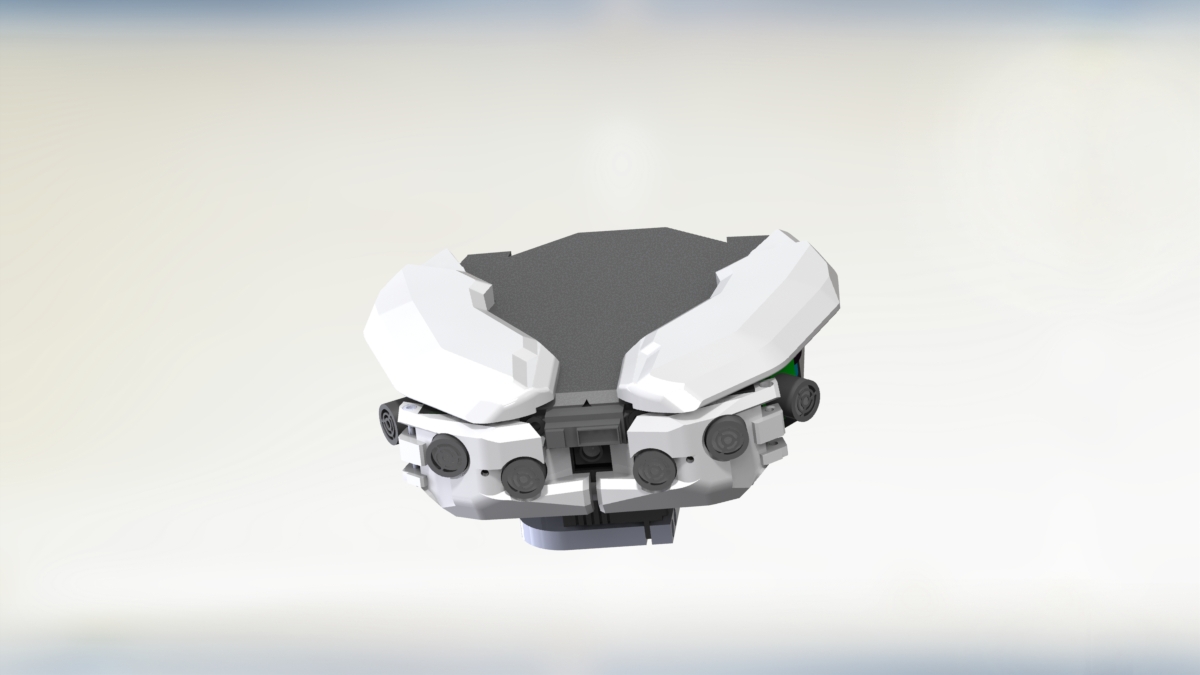
J'ai commandé un switcher de filtre pour passer de vision nocturne à normal quand il le voudra, parce que les infrarouges faussent les couleurs. Ça se monte à la place de la monture de la webcam et c'est motorisé! Avec tout ça je dois refaire quelques modifs esthétiques pour mieux intégrer les 2 gros objectifs.
Un petit avant/aprés :

Si quelqu'un a une idée de comment diminuer le jeu des arbres moteurs ça m'aiderait beaucoup !
Concernant le moteur, il semble bien construit et coupleux. Il tourne dés 0.8V, un petit jeu sur l'arbre dans la direction de l'axe mais rien d'anormal, et son rendement monte à 77% ! (ça reste un brushed)
Je l'ai piloté avec un pwm+mosfet et j'ai regardé sa tension: gros pique de tension au début, parasite des charbons bien visible, et ça se retrouve dans la tension de l'alim (le gros pique surtout).
Du coup j'ai tout filtré avec 2 condo+diode. J'ai aussi testé un rodage d'une bonne demi heure en soufflant de temps en temps sur les charbons, mais à 12V il y a autant de parasites et détincelles.
Coté vision j'ai reçu des objectifs 2.8mm f1.2, c'est trés lumineux et ca donne 120 degrés de champs de vision. J'ai aussi retiré le filtre ir!
voila ce que ça donne avec seulement une petite ampoule à filament -> https://www.youtube....eature=youtu.be
J'ai commandé un switcher de filtre pour passer de vision nocturne à normal quand il le voudra, parce que les infrarouges faussent les couleurs. Ça se monte à la place de la monture de la webcam et c'est motorisé! Avec tout ça je dois refaire quelques modifs esthétiques pour mieux intégrer les 2 gros objectifs.
Un petit avant/aprés :
Si quelqu'un a une idée de comment diminuer le jeu des arbres moteurs ça m'aiderait beaucoup !
- Taupiot_Jr aime ceci
#65879 Robot Quadrupède intelligent.
Posté par
- 10 novembre 2015 - 10:52
Ok merci! Sur le site c'est marqué dans la description " Plage de mesure: -5 A à +5 A en AC ou DC " une erreur dans la description peut être..
Ils utilisent un shunt de 1.2 mOhms, donc pas beaucoup de perte par rapport a 1 ohm
Pour faire le lien avec le projet, je reste toujours à la recherche de la bonne motorisation pour les bras et jambes.. Ce que j'ai fait avant me suffit pour des petites articulations mais pas pour les épaules ni jambes. Donc pour l'instant je cherche du coté des moteurs cc car on les contrôle facilement, y'en a des puissants pour pas trop cher et avec des réducteurs précis et solides. Une autre solution qui me fait de l’œil c'est des brushless sensored.
Sinon je termine enfin la tête, finalement une 2ème camera sera intégrée pour faire de la stéréo vision. J'ai deja fait quelques testes avec 2 cameras (de mauvaise qualité) et c'est plutôt précis, ça dépend beaucoup de la calibration.
- Taupiot_Jr aime ceci
#65793 Robot pour Inspection et débouchage canalisation
Posté par
- 06 novembre 2015 - 06:21

#65353 Robot Quadrupède intelligent.
Posté par
- 27 septembre 2015 - 08:07
Des news. La carte pour contrôler les moteurs est faite, je n'utilise plus l'électronique des servomoteurs.
Avec ce nouveau système j'ai un retour de couple, de position, je peux contrôler le couple et la vitesse, et faire un pid totalement personnalisé.
https://www.youtube....eature=youtu.be
Dans la vidéo on voit le fonctionnement du pid : plus l'écart de position est grand et plus je force dessus, plus il regagne sa position avec force et vitesse.
Une fois tout ca peaufiner, il faudra faire une connexion du même type que les dynamixels, parce que faire ce système sur tous les moteurs mange trop d'e/s sur la arduino méga !
- Oliver17 aime ceci
#65091 Robot Quadrupède intelligent.
Posté par
- 23 août 2015 - 12:24
Le pan/tilt de la tête est imprimé et fonctionne!
J'utilise maintenant une arduino due pour essayer d'augmenter la vitesse des échanges entre le pc et la carte. Ca marche plutôt bien, je transmets les coordonnées x et y des objets détectés, le nombre d'objet et visage détectés, les fps de la caméra et l'heure, sans aucun ralentissement visible ! Je vous mets une petite vidéo :
https://www.youtube....h?v=XomSzZmuVVg
- Taupiot_Jr aime ceci
#64650 Robot Quadrupède intelligent.
Posté par
- 04 juin 2015 - 08:46
#64497 Robot Quadrupède Arduino Uno
Posté par
- 17 mai 2015 - 08:15
#64279 Robot Quadrupède intelligent.
Posté par
- 24 mars 2015 - 12:45
Salut Melmet,
Je n'ai pas de schéma de fait, mais je peux te décrire comment elle est faite:
La batterie (lipo 2s) alimente 2 régulateurs de tension (lm1084).
2 condensateurs de 1000uf sont mis en amont et en aval du régulateur 5v, et 2 de 220uf pour le régulateur 3.3v.
Pour la partie coupure:
Un pont diviseur de tension divise par 2 la tension de la batterie et l'envoie sur une entrée analogique.
Une sortie logique de l'arduino est reliée à la base d'un transistor (avec une résistance de 250ohms), le + de la batterie sur le collecteur et l'émetteur à la bobine du relais.
Une diode de roue libre est mise en parallèles de la bobine.
Pour le programme.
La valeur 550 correspond à 6.1v au niveau de la batterie. Il suffit de mettre à l'état bas la sortie logique quand la valeur est en dessous de 550.
Voila! N'hésite pas si tu veux d'autre précision
Je n'ai pas de schéma de fait, mais je peux te décrire comment elle est faite:
La batterie (lipo 2s) alimente 2 régulateurs de tension (lm1084).
2 condensateurs de 1000uf sont mis en amont et en aval du régulateur 5v, et 2 de 220uf pour le régulateur 3.3v.
Pour la partie coupure:
Un pont diviseur de tension divise par 2 la tension de la batterie et l'envoie sur une entrée analogique.
Une sortie logique de l'arduino est reliée à la base d'un transistor (avec une résistance de 250ohms), le + de la batterie sur le collecteur et l'émetteur à la bobine du relais.
Une diode de roue libre est mise en parallèles de la bobine.
Pour le programme.
La valeur 550 correspond à 6.1v au niveau de la batterie. Il suffit de mettre à l'état bas la sortie logique quand la valeur est en dessous de 550.
Voila! N'hésite pas si tu veux d'autre précision
- Melmet aime ceci
#64273 Robot Quadrupède intelligent.
Posté par
- 23 mars 2015 - 08:50
Ce soir j'ai terminé la carte d'alimentation : 3.3V-5a, 5V-5a, et auto coupure quand la batterie est faible !
La coupure est faite par un relais, piloté par l'arduino (avec un transistor).
J'ai fait une petite vidéo :www.youtube.com/watch?v=6oZVmA5vmKM&feature=youtu.be
- Melmet aime ceci
#63589 Dimensionnement d'une batterie
Posté par
- 29 janvier 2015 - 03:10
Tu peux par exemple additionner les courants nominaux de tout ce que tu vas mettre dessus. Pour les moteurs tu peux prendre les intensités max, pour calculer une autonomie minimale, parce ce que sinon ca va dépendre de si tu le laisses stationnaire longtemps ou pas, si t'avances a fond ou pas..
Si la conso n'est pas trop grande, les packs ni-mh voir li-ion peuvent suffirent. Mais si ca consomme pas mal prend plutôt des li-po ou li-fe. Renseigne toi sur les types de batteries pour justifier ton choix.
Si la conso n'est pas trop grande, les packs ni-mh voir li-ion peuvent suffirent. Mais si ca consomme pas mal prend plutôt des li-po ou li-fe. Renseigne toi sur les types de batteries pour justifier ton choix.
- Chøxper aime ceci
#63549 Dimensionnement d'une batterie
Posté par
- 27 janvier 2015 - 07:09
Salut! Vous allez utiliser quels moteurs et combien? Si ton robot est sur roues ou chenilles, j'imagine que le poids n'est pas un problème. Avant de dimensionner la batteries, as tu choisi la technologie?
- Chøxper aime ceci




