Mon contenu
Mon contenu Homme
Homme






 Posté par
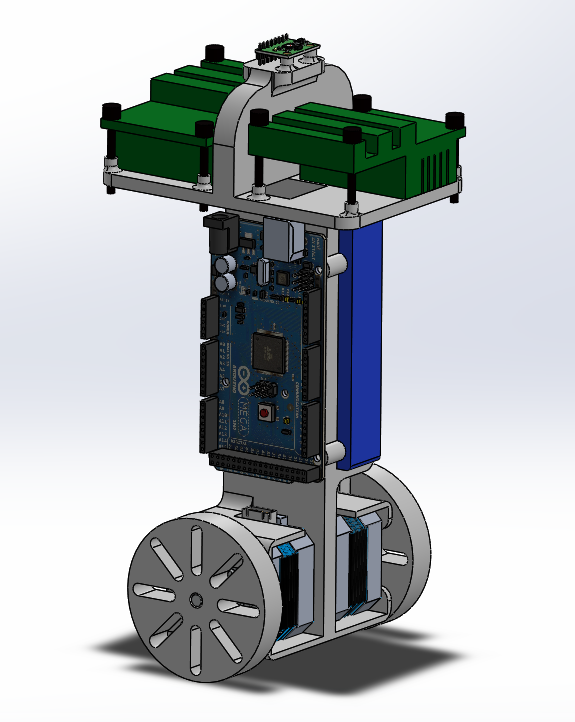
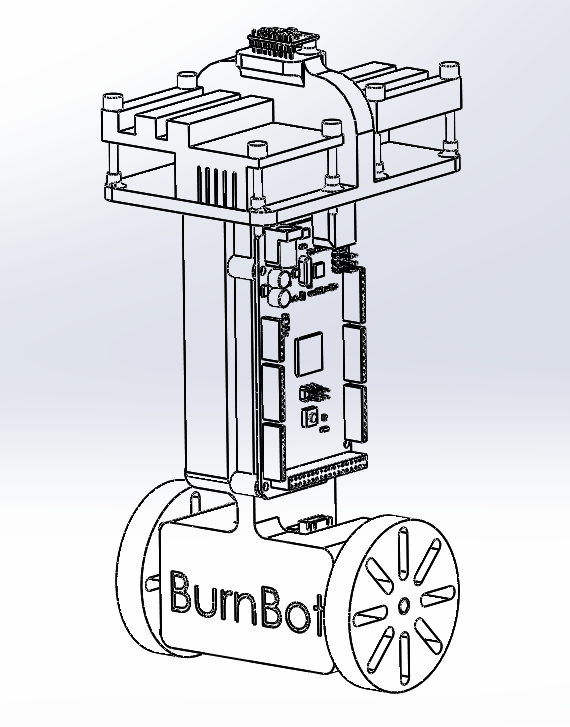
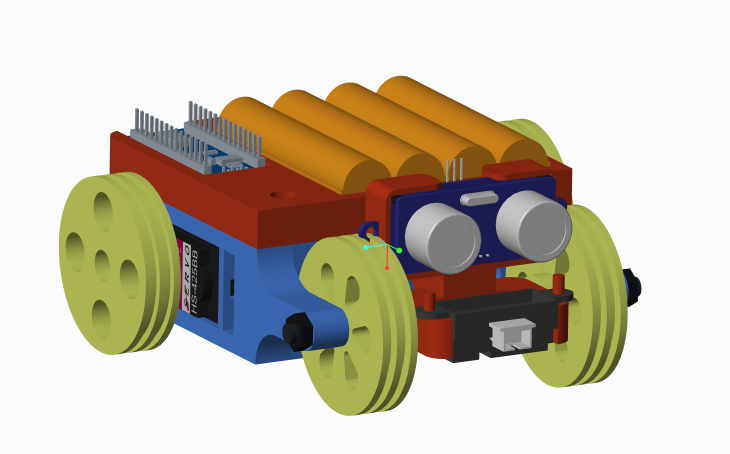
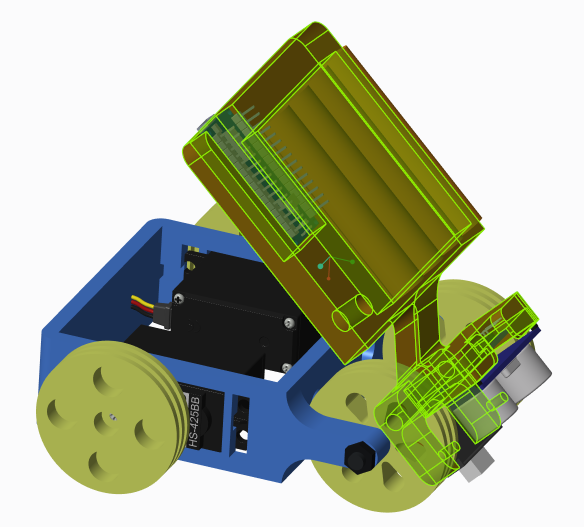
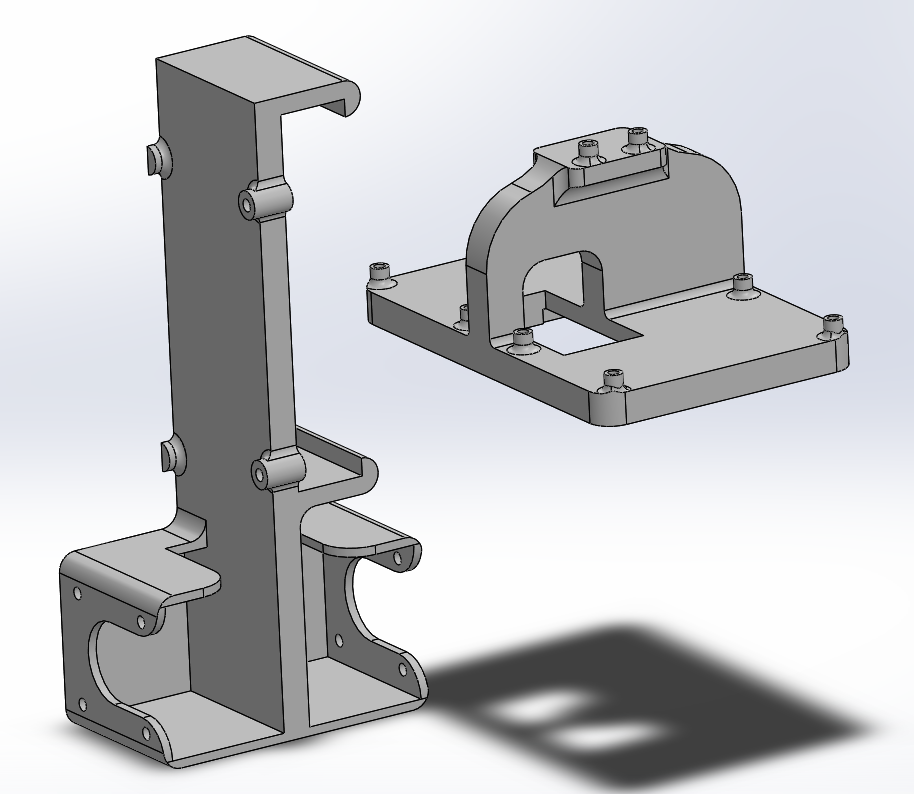
Posté par Le chassit est beaucoup trop gros pour être imprimé en une fois !
Du coup je l'ai séparé en deux pièces ce qui m'embête d'un point de vu assemblage mais je peux beaucoup mieux l'imprimer donc je ne sais pas encore si ça m'arrange ou pas

Je comence l'impression demain, le robot devrait être monté dans le week end

Keep you update
- Mike118 aime ceci