Mon contenu
Mon contenu Homme
Homme



 Posté par
Posté par Hello!
J'ai bien avancé sur ce projet, on a maintenant un générateur de roues, d'engrenages, de pneus et de chenilles.
Il y a également un générateur pour l'ensemble, avec quelques petits ajustements à faire :

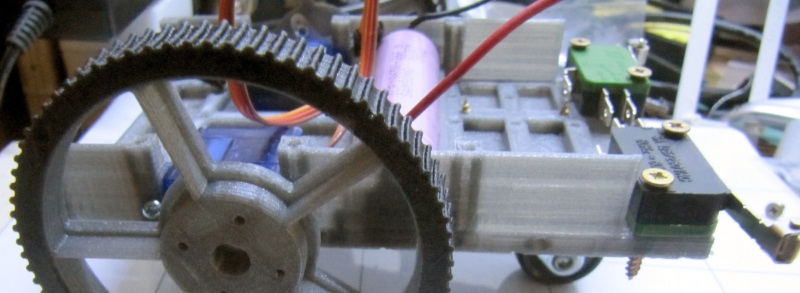
Sur ce rendu 3D, vous pouvez voir la roue libre avant, la roue propulsée à l'arrière, et l'engrenage qui entraîne la roue
propulsée. Cela permet de ne pas exercer de forces latérales sur l'axe du moteur, mais plutôt de les exercer sur l'axe
des roues qui est en acier de 5mm.
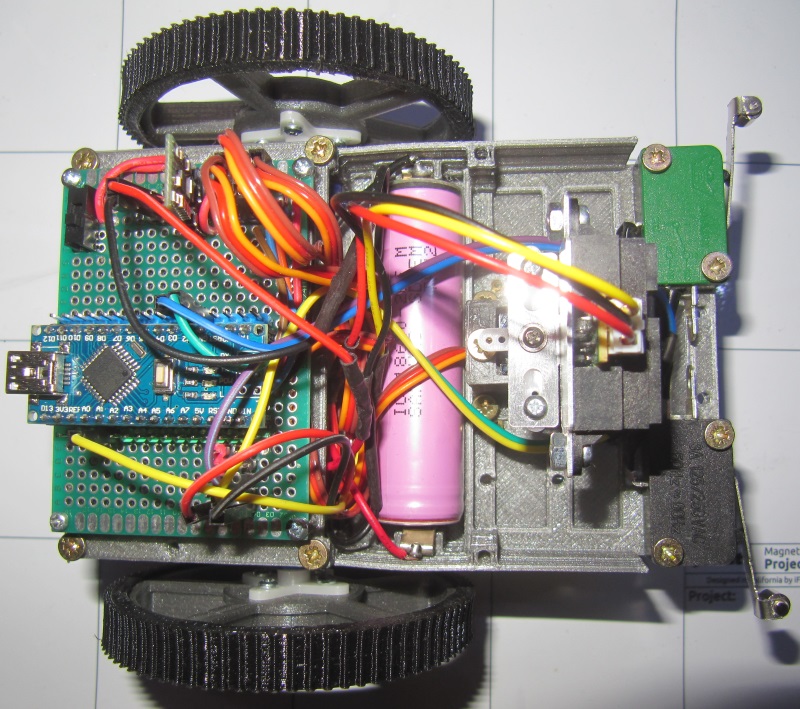
Le système est compatible avec des roues ou encore des chenilles comme sur cette photo :

- Path aime ceci