Mon contenu
Mon contenu Homme
Homme





 Posté par
Posté par Finalement j'ai changé la carte SD et la carte RPI3B par une RPI3B+ que j'avais en stock.
Pour ma mémoire si il y a une prochaine fois : Ré-Installation Raspbian Strech + configuration Rover1sur RPi 3
- Télécharger Raspbian Stretch et copier sur une carte SD 8GO avec Win32DiskImager (+ fichier ssh file pour activation SSH et fichier wpa_supplicant.conf pour configuration Wifi)
- Booter le Rpi3 and login via Putty + sudo raspi-config ( add Camera +VNC server, expand root file system, timezone GMT-6) + IP fixe dans /etc/dhcpcd.conf .
- Mettre à jour Stretch : sudo apt-get update , sudo apt-get upgrade
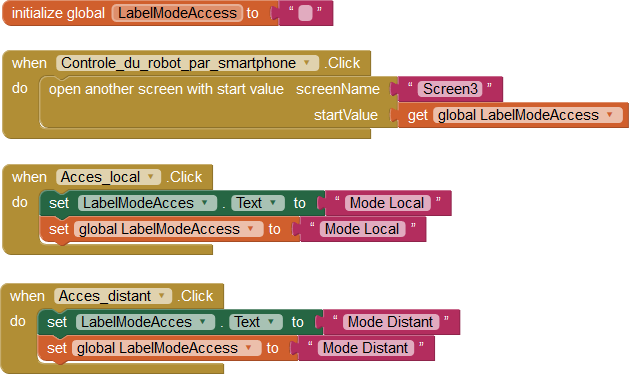
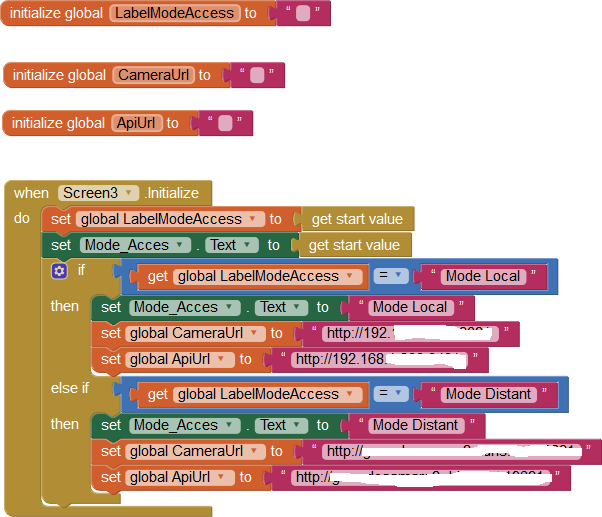
- Restaurer les fichiers Rpi python et sketches arduino du robot
- Connexion au RPI par le client VNC viewer
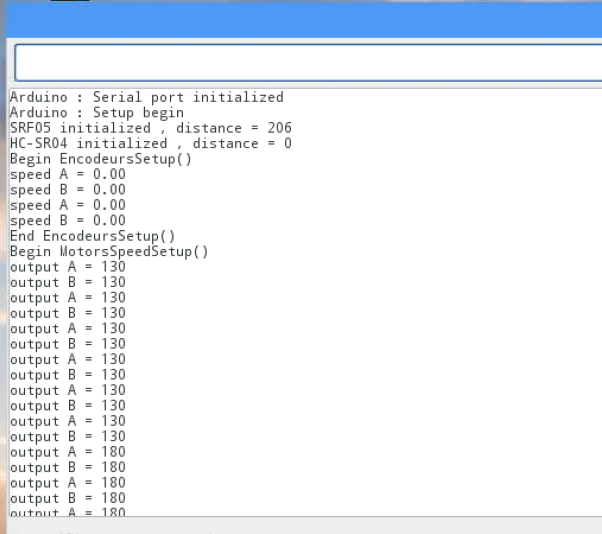
- Installer l' IDE Arduino 1.8.7 (Zip)
- Installer les bibilothèques NewPing , TimerOne and Pid
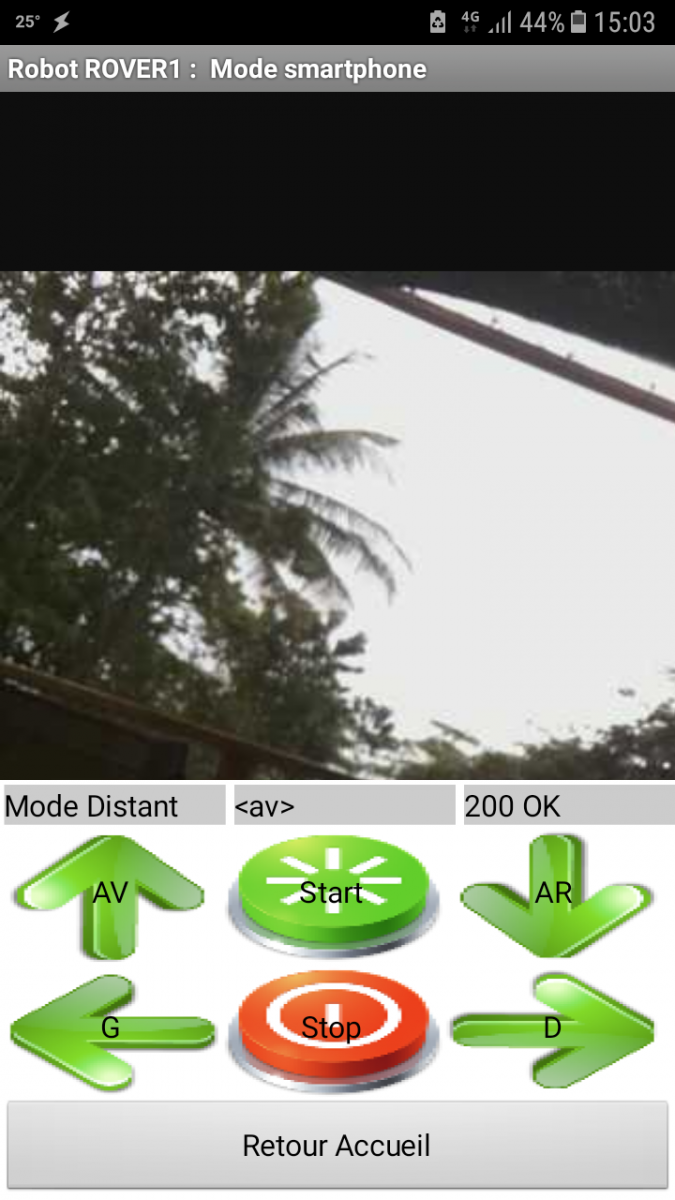
- Configurer la caméra PI V2
- Installer et configurer "motion" sur le RPI3