
 Mon contenu
Mon contenu Homme
Homme





Salut a toi, et bienvenue dans cette communauté qui sera ravie de t'aider là ou elle le peut !
- samuelfer99 aime ceci
 Posté par
- 27 novembre 2016 - 06:32
Posté par
- 27 novembre 2016 - 06:32
Salut a toi, et bienvenue dans cette communauté qui sera ravie de t'aider là ou elle le peut !
Posté par
- 26 novembre 2016 - 05:18
Avec le kit Ultimate 2.0 de makeblock, il y a la possibilité de monter un petit robot auto-equilibré très sympatique.
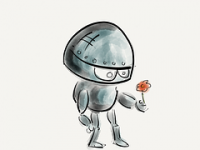
En partant de cette base et avec juste le contenu du kit, j'ai tenté de monter un robot auto-équilibré un peu plus grand, avec un mécanisme pour se remettre droit après un échec d'équilibrage.
Ca donne cela :
Le mécanisme pour remonter le robot fonctionne bien, mais il déplace le centre de gravité vers l'une des roues, ce qui oblige a un contrôle asymétrique des roues pour tenter de se déplacer tout droit.
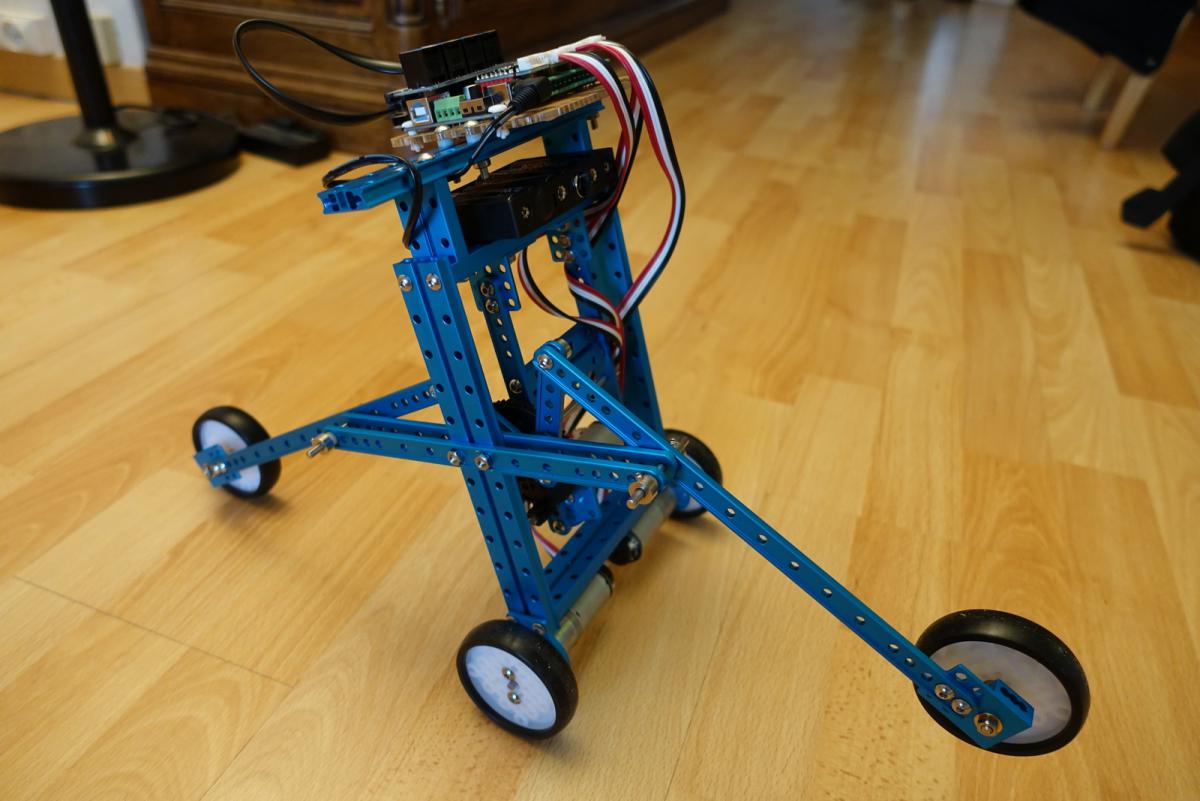
Avec en plus l'ajout de poids, la taille du robot ne permet plus de s'auto-équilibrer avec les moteurs fournis et les roues utilisée. Il faut trop vite envoyé la puissance maximum au roues et même cela ne suffit pas.
Un peu de tweeking tu PID permet de le maintenir quelques secondes, mais le moindre déviation de plus de 1 degré n'est pas rattrapée par les moteurs même en puissance max.
Je vais donc changer d'approche, en remplacant les deux bras par un seul mécanisme de balancier, je vais aussi remonter le centre de gravité, de ce que j'ai lu ça facilite l'auto-équilibrage, et je vais essayer de le garder plus proche du mileu des deux roues.
Suite au prochain numéro.
Posté par
- 01 novembre 2016 - 06:02
Apres une grosse pause estivale, me revoilà à la robotique.
Avec le matériel que j'avais achété a JEF en juin, il y avait normalement tout ce qu'il fallait pour monter un petit hexapode.
J'ai donc profité de cette période d'Halloween pour m'attelé à la tache.
Bilan après un peu de temps de montage, de recherche internet pour trouver des bouts de specification de la carte de controle des servos, j'ai un hexapode qui est monté, et qui commence même a bouger :

C'est pas encore glorieux, mais c'est un debut, et ca veut surtout dire que j'ai trouvé un logiciel qui arrive a communiquer avec mon carte controlleur inconnue.
Prochaines étapes :
Si ca aboutit j'aimerai y apposer une petite caméra pixie sur un servo et apprendre a mon hexapode à se deplacer tout seul vers les balles que je lui lance  .
.
Posté par
- 30 juin 2016 - 10:14
J'ai donc modifé le node ROS de gestion des encodeurs :
Avec toute ces modifications ça se passe beaucoup mieux, l'estimation de position est bien meilleur :
Prochaines étapes :




