Mon contenu
Mon contenu Not Telling
Not Telling
 Posté par
Posté par Merci Oracid,
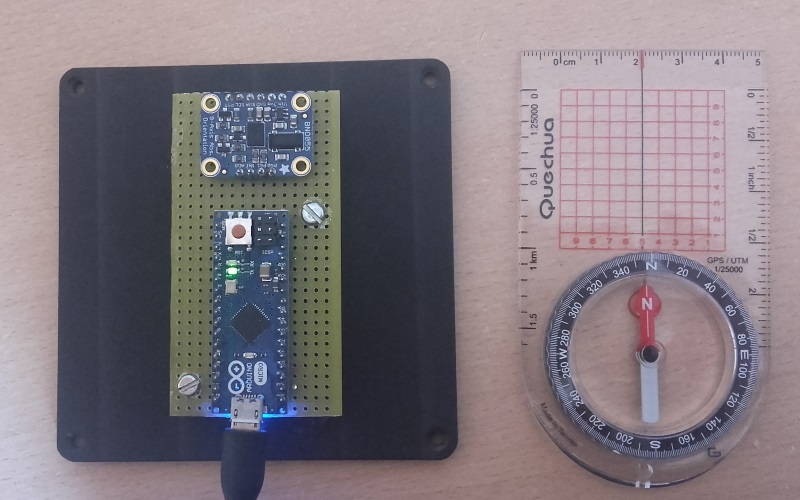
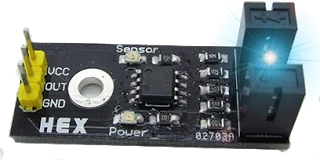
les capteurs de Pablo sont pour la plupart créés à partir de modules Arduino qui réalisent une tâche bien précise ( comme l'odométrie et le compas ) et font remonter ces informations par USB vers Pablo via un port série virtuel par module. L'application qui fait vivre Pablo est hébergée sur un PC portable, développée en C# avec Microsoft Visual Studio ( je montrerai l'architecture en détail par la suite ). Les informations sont affichés sous forme de jolis cadrans qui sont créés par d'autres développeurs je précise, je ne fais que customiser !
Les mesures ne sont pas enregistrées mais elles sont utilisées pour la navigation.
Et puisqu'on parle navigation ...
Maintenant que Pablo sait mesurer une distance et suivre un cap, on peut déjà lui demander un petit chalenge : suivre un parcours très simple, programmé, avec retour au point de départ sans l'aide du GPS.
par exemple un carré :
4 mètres, cap 320°
4 mètres, cap 50°
4 mètres, cap 140°
4 mètres, cap 230°
le tout à vitesse réduite.
Prêt ? Partez ! (avec un aperçu des correction de trajectoire en temps réel)
on remarquera au passage que Pablo a perdu sa batterie, d'où le câble d'alimentation qu'il traine pour les essais...
Pas si mal. Au final une petite erreur de distance à cause des virages sec à 90° mais rien de bien méchant, en navigation réelle les écarts sont rattrapés à chaque calcul d'un nouveau segment par la position du GPS.
L'important est de valider l'odomètre et le compas.