

 Mon contenu
Mon contenu Not Telling
Not Telling
Un autre sujet en cours sur la picole :
http://www.robot-maker.com/forum/topic/12318-ara-assistant-robotique-apicole/
 Posté par
- 04 septembre 2018 - 10:10
Posté par
- 04 septembre 2018 - 10:10
Un autre sujet en cours sur la picole :
http://www.robot-maker.com/forum/topic/12318-ara-assistant-robotique-apicole/
Posté par
- 21 août 2018 - 06:00
Élève fUtUrTECH, nous avons bien compris l'esprit de votre présentation fort sympathique mais néanmoins parsemée que quelques entorses à la conjugaison française. Je me permets donc de vous rendre votre copie corrigée (si je ne me suis pas moi-même planté) :
Spoiler
J'attends les particules en faisant des pâtés de sable. Au soleil.
Posté par
- 06 août 2018 - 07:37
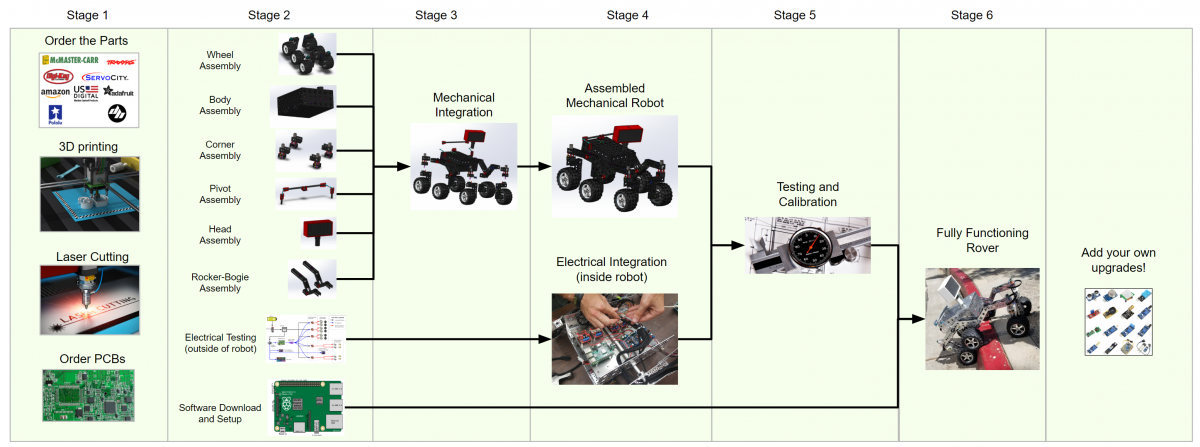
Le Jet Propulsion Laboratory de la NASA (avec CalTech), qui a construit l'astromobile/le rover Curiosity pour explorer la planète Mars, a publié sur GitHub les plans d'une version réduite et abordable de ce véhicule sous licence Apache v2.
Vous pouvez donc l'étudier, le construire ou l'améliorer !
Le cerveau utilisé est un RaspBerry Pi. Vous pouvez le contrôler via une application Android.
NdM. : ce rover est une version réduite (36cm, 11kg, 17cm/s) de Curiosity (2,7m, 899kg et 4 cm/s sur Mars). Il est conçu pour pouvoir être réalisé avec des composants du commerce. La publication a été réalisée pour « inspirer la future génération des scientifiques, ingénieurs et roboticiens pour nous aider à explorer et découvrir notre système solaire (et au-delà !) ». L'utilisation de la licence Apache v2 semble contredite par les critères supplémentaires suivant : être âgé de plus de 18 ans, décharge de responsabilité et pas d'utilisation commerciale. Le JPL explique par ailleurs avoir produit précédemment une version réduite de Curiosity à des fins éducatives (un mini-rover baptisé ROV-E), pour les classes, musées et événements scolaires. Et face au succès, ils ont décidé de produire un modèle inspirant et réalisable pour moins de 2500 USD (environ 2160 EUR).
Un lien vers l'article original
Posté par
- 31 juillet 2018 - 12:36
Dans ton cas c'est l'échange de données entre 2 applications qui ne se passe pas bien, reste à voir si toutes les informations étaient présentes. J'ai envoyé pas plus tard que la semaine dernière des fichiers générés par Kicad à un sous-traitant qui me fabrique les circuit sans rien demander d'autre. Si, des sous.
Posté par
- 11 juillet 2018 - 04:53
Tu peux le faire aussi avec un moteur de lève vitre de voiture ça un très fort couple puisqu'il faut soulever une vitre de voiture qui pèse très lourd le problème c'est le prix neuf environ 150 euros mais dans une casse ça peux le faire
Tout à fait. Le moteur de lève vitre tourne toutefois un peu plus vite, à peu près 3 tours par seconde. Une particularité : un enrouleur de câble. Pour soulever quelque chose par exemple.
Posté par
- 09 juillet 2018 - 08:19
Charles Galambo, un gars dont je suis la réalisation depuis quelques temps, présente les premiers pas de son dogbot.
Pas de servomoteur, des moteurs brushless
Posté par
- 07 juillet 2018 - 09:42
J'apporte une précision.
D'accord avec une œuvre musicale qui tombe dans le domaine public avec le temps (pas moins de 70 ans), donc libre de droit.
Pour autant, quelle que soit sa manière d'exploitation (interprétée par un musicien à partir d'une partition, exécutée par un instrument à partir d'un fichier MIDI, au pipeau ou par un orchestre symphonique, diffusée à la radio, dans une salle d'attente ou un festival,... ) une œuvre musicale donne droit à rémunération pour les titulaires de droits.
Une tolérance existe lorsque aucun profit n'est généré. Mais si vous êtes rémunéré au clic ...
NDLR : même si votre chaine VousEnTube ne génère pas de profit, votre vidéo peut être bloquée :
"Votre vidéo a été bloquée.Nous avons identifié du contenu protégé par des droits d'auteur dans votre vidéo.
Les internautes ne peuvent pas visionner cette vidéo sur YouTube en raison des règles définies par le demandeur."
Tout dépend du titre. Du coup une astuce : tester sur un autre compte une vidéo 'bidon' avec le titre en question. S'il n'y a pas de plainte au bout de quelques jours c'est que son utilisation est tolérée.
Posté par
- 21 mai 2018 - 06:04
@ashira
Le module que j'utilise est un C94-M8P de u-blox
La précision est en théorie de l'ordre du centimètre. En utilisant le logiciel u-center, j'observe une déviation de 2 cm lorsque Pablo est au repos (disons que ça bouge un peu mais c'est si faible que je ne peut pas le mesurer). Il m'est arrivé d'observer d'un coup un 'bond' d'un mètre mais ce jour-là j'avais laissé l'antenne de la base sur un toit brulant à 50° donc ce n'est pas représentatif.
Du coup je t'ai fait une manip aujourd'hui. J'ai créé un parcours dans le jardin que Pablo a répété inlassablement durant toute l'après-midi. Les points à relier sont matérialisés par des CD.
Voici le résultat en fin de journée.
Pablo est un véhicule en mouvement, il réalise de grands déplacements de plusieurs kilomètres à chaque sortie du coup je ne lui demande pas une précision centimétrique. Au début je me contentais d'un mètre, ensuite j'ai voulu 50 cm, aujourd'hui c'est le diamètre d'un CD et ça me convient. Pour être clair, les derniers centimètres sont comptés par odométrie.
Pour être plus précis il faudrait intégrer la vitesse.
En ce qui concerne l'altitude, je parse la trame RMC qui ne contient pas cette valeur. Donc aujourd'hui je ne peux pas te répondre sur la précision en altitude.
Posté par
- 09 avril 2018 - 01:54
C'est pas réellement un robot, c'est un one wheel même principe qu'un segway.
Donc c'est pas 40 kg c'est moi (100kg) + la structure (20kg) soit 120kg
Ce que je redoute, c'est l'intensité de démarrage.
Posté par
- 30 mars 2018 - 03:29
Ce petit robot (55,9 × 45,7 × 30,4 cm) à chenilles peut déplacer une caravane de 4 tonnes :
Mais c'est cher.
https://trailervalet...ASAAEgKvMvD_BwE
D'autres “Camper Trolley” existent.
Posté par
- 26 février 2018 - 07:16
Un arduino, un Raspberry Pi 3, une imprimante 3D et un fer à souder ...
Minouminouminou !
https://create.ardui.../opencat-845129
Posté par
- 10 février 2018 - 01:31
En rapport avec la vision industrielle, une vidéo extraite d'une étude réalisée l'année dernière. Le chalenge consiste à naviguer dans les menus de smartphones en utilisant une table 3 axes.
on doit
Je suis parti au départ sur OpenCV qui permet de faire beaucoup de chose c'est pourquoi je le recommande. Après il faut bien avouer que j'ai fini par utiliser un système de vision pour l'industrie qui offre des outils franchement faciles à utiliser mais ce n'est pas gratuit !
Partie mécanique : la table 3 axes est industrielle, précise au dixième, équipée de moteurs pas à pas. Les contrôleurs sont pilotée en Ethernet.
Côté logiciel : je pilote le système de vision et la table 3 axes en C#
L'extrait présente juste la détection et la mise sous tension d'un iPhone, un test de dalle tactile, la reconnaissance et la saisie sur le clavier même si on ne connait ni la position ni l'orientation au départ. Vive le cosinus !
Posté par
- 07 février 2018 - 11:04
"Regardez, c'est notre nouveau robot, il est bourré d'intelligence artificielle !"

Edit : reprise de l'import d'image
Posté par
- 27 janvier 2018 - 07:29
Coup de vent après tempête après averses après sale temps, faut trouver la motivation avant de ressortir à la plage.
Depuis que Pablo est équipé de sa LattePanda, je reprends les essais de Décembre 2016 sur l'utilisation d'une Kinect de XBOX 360 pour la détection des obstacles. Et pour éviter de tomber du quai, c'est haut.
Posté par
- 26 janvier 2018 - 02:21
Il s’agit d’une course de voiture autonome en modèle réduit (vision par ordinateur ou réseau de neurones artificiels).
Objectif : réussir à conduire votre voiture autonome sur le circuit pendant 3 boucles, et le plus vite possible !
Lieu :
Le Square
3 Passage Saint-Pierre Amelot
75011 Paris
http://www.mylanderpages.com/IronCar2018/IronCar2018
J'ai déjà essayé d'ajouter au calendrier plusieurs fois, sans succès





