Bonjour à tous,
Je voudrai vous présenter un projet sur lequel je m’amuse en ce moment. C’est donc un hexapode.
C’est la V2 – la V1, à base de servos SG90 à vite montré ses limites. Certains SG90 sont mort dans un affreux couinement  (les accouplements ont lâchés les uns après les autres).
(les accouplements ont lâchés les uns après les autres).
Pour cette seconde version, j’ai choisi de m’orienter sur des MG995 (acheter dans la boutique d’ailleurs).
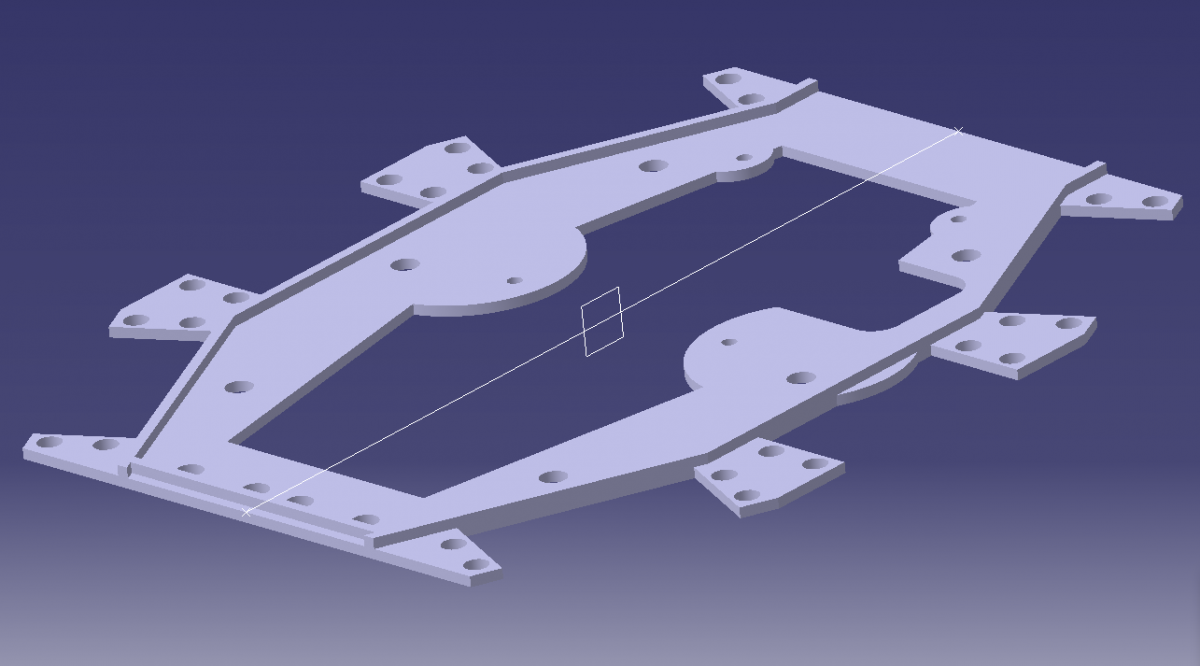
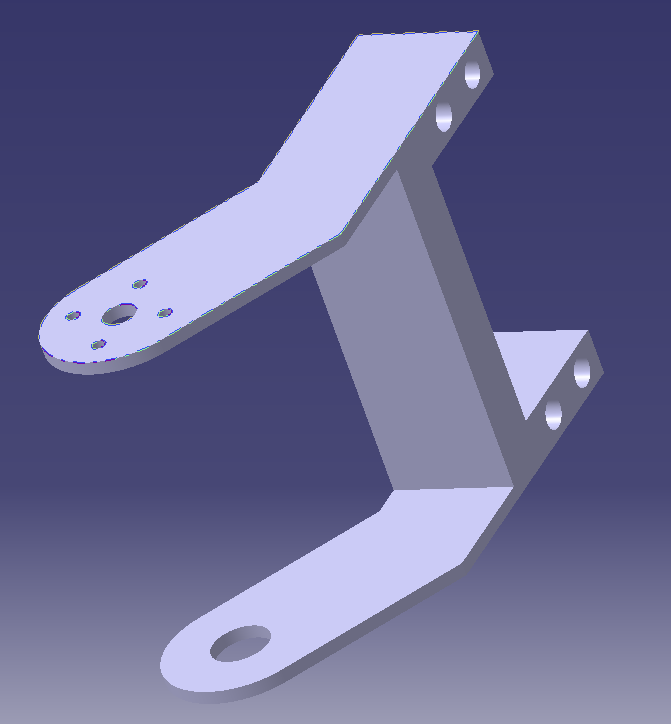
Voici la conception :
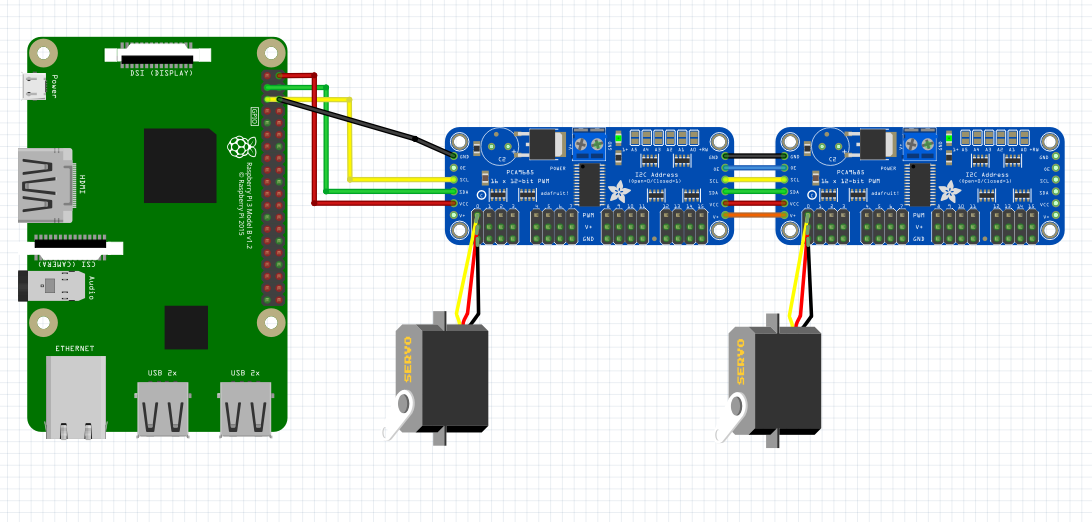
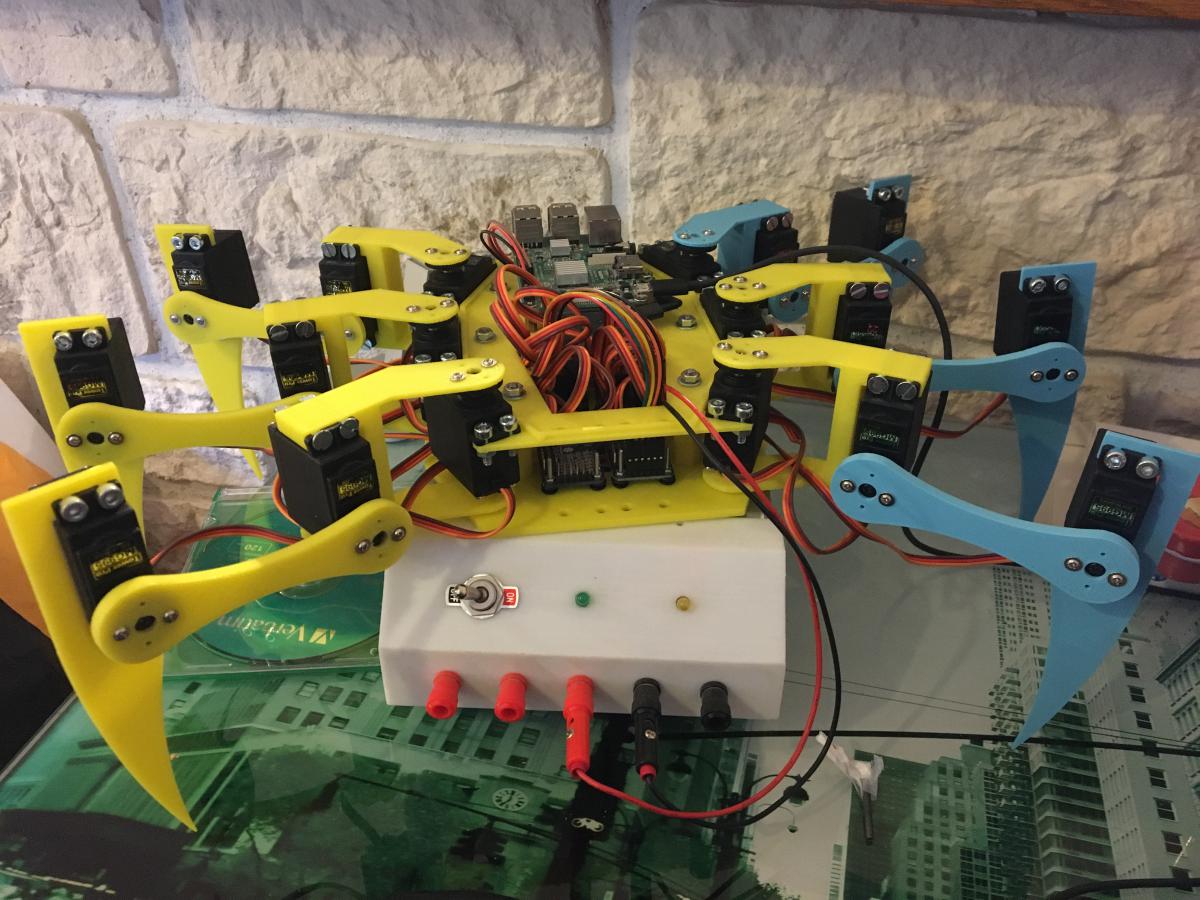
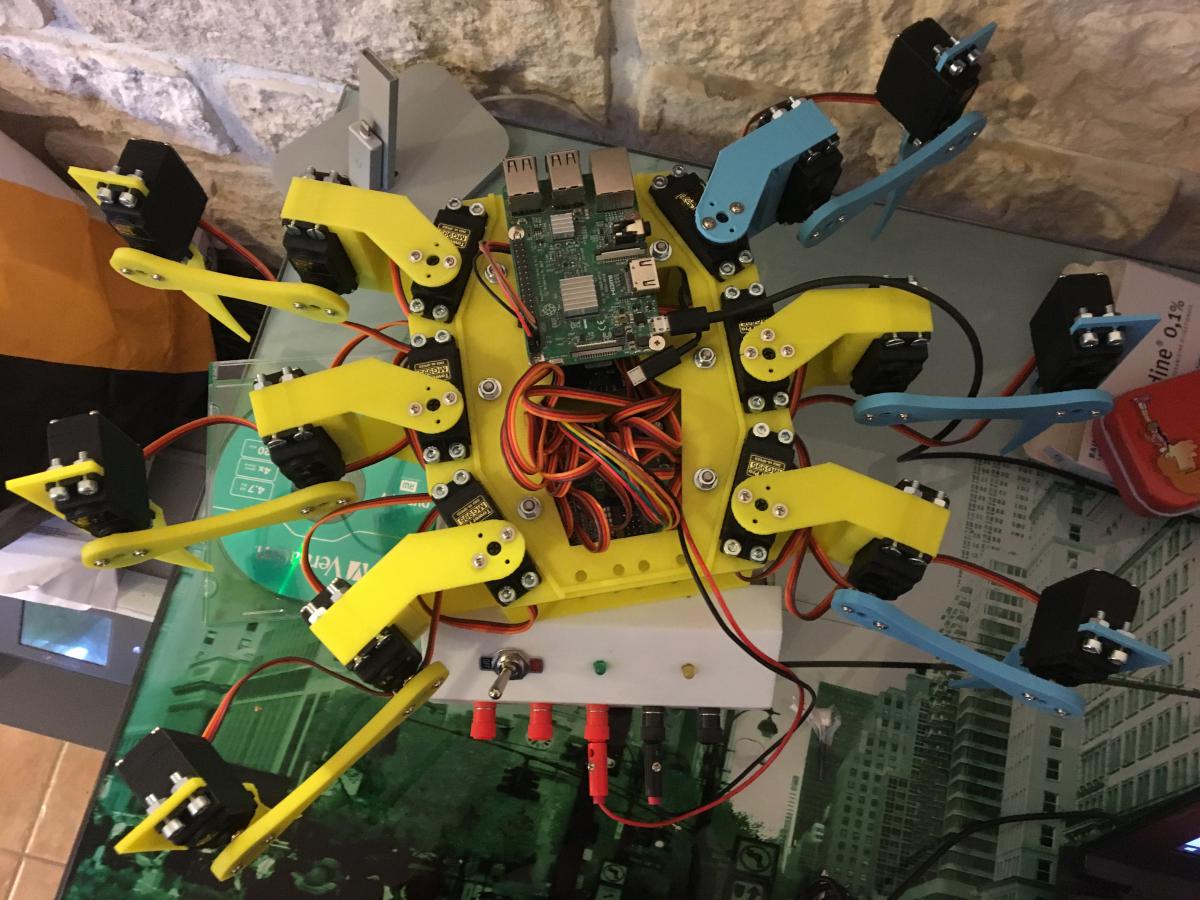
Pour l’électronique, je suis parti sur un raspberry en liaison I2C avec deux cartes Adafruit 16-channels 12-bit PWM/Servo driver – j’ai fait tout simple :
Côté alimentation :
Le raspberry est alimenté par une batterie 5V. Et pour le moment, j’utilise une alimentation pc pour la partie puissance. Je suis en train de chercher la solution : nimh ou lipo… Sachant qu’en théorie, chaque servos peut tirer 1.45A en pleine charge, ça ferait 26A  . Il faut que je dimensionne la batterie et le convertisseur après avoir fait une mesure réelle.
. Il faut que je dimensionne la batterie et le convertisseur après avoir fait une mesure réelle.
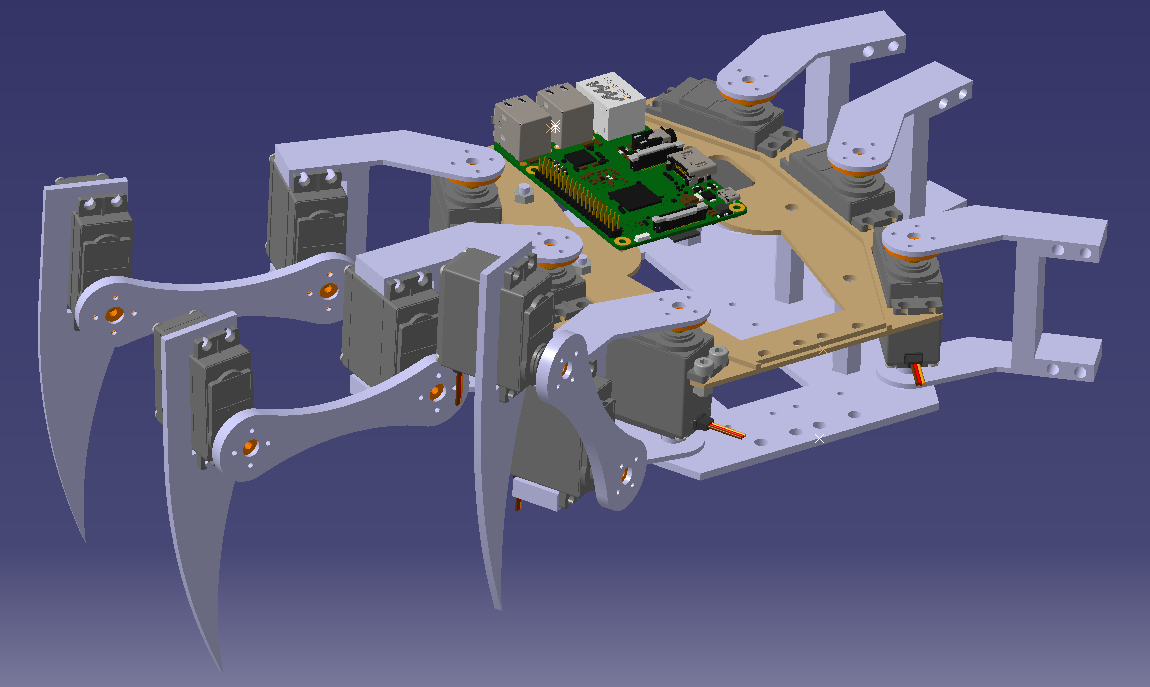
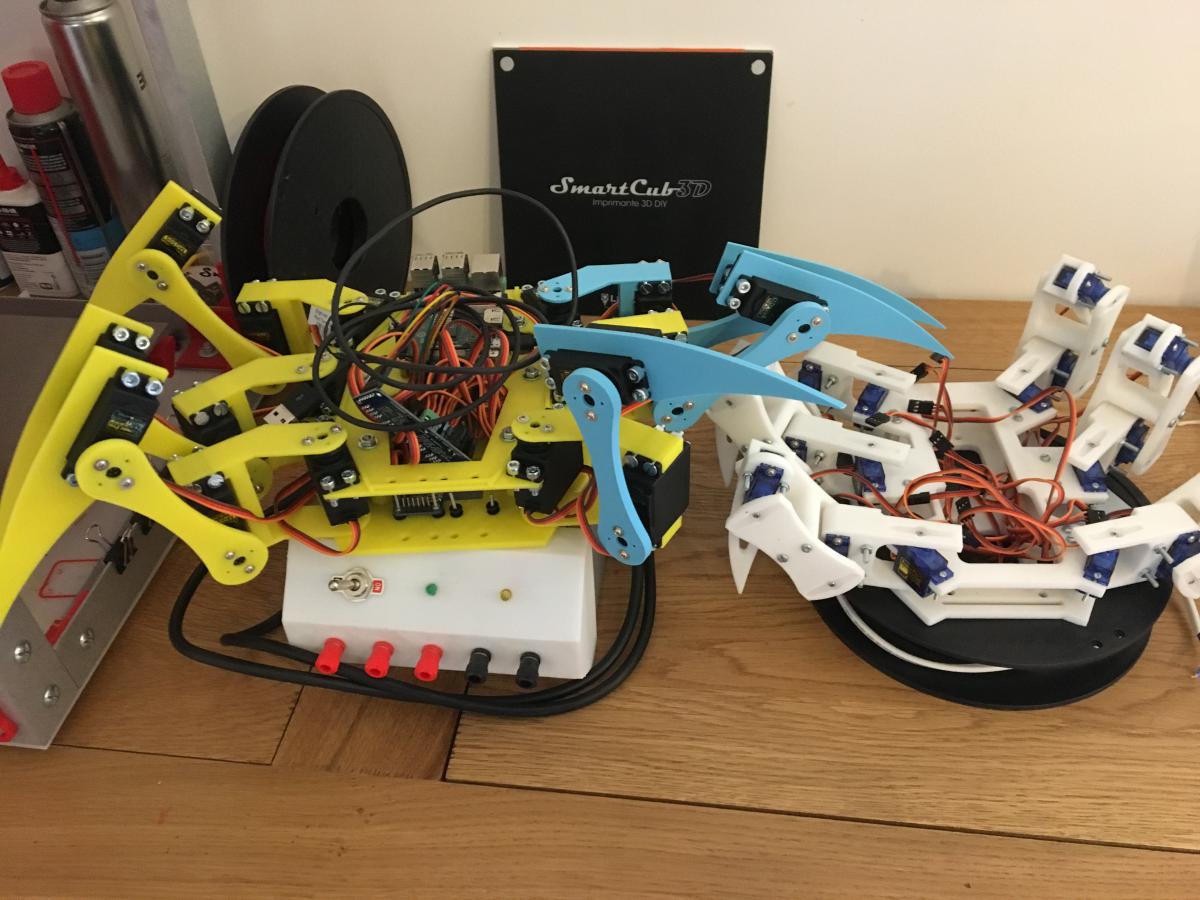
Réalisation (sur la première photo, la V1 est à droite) :
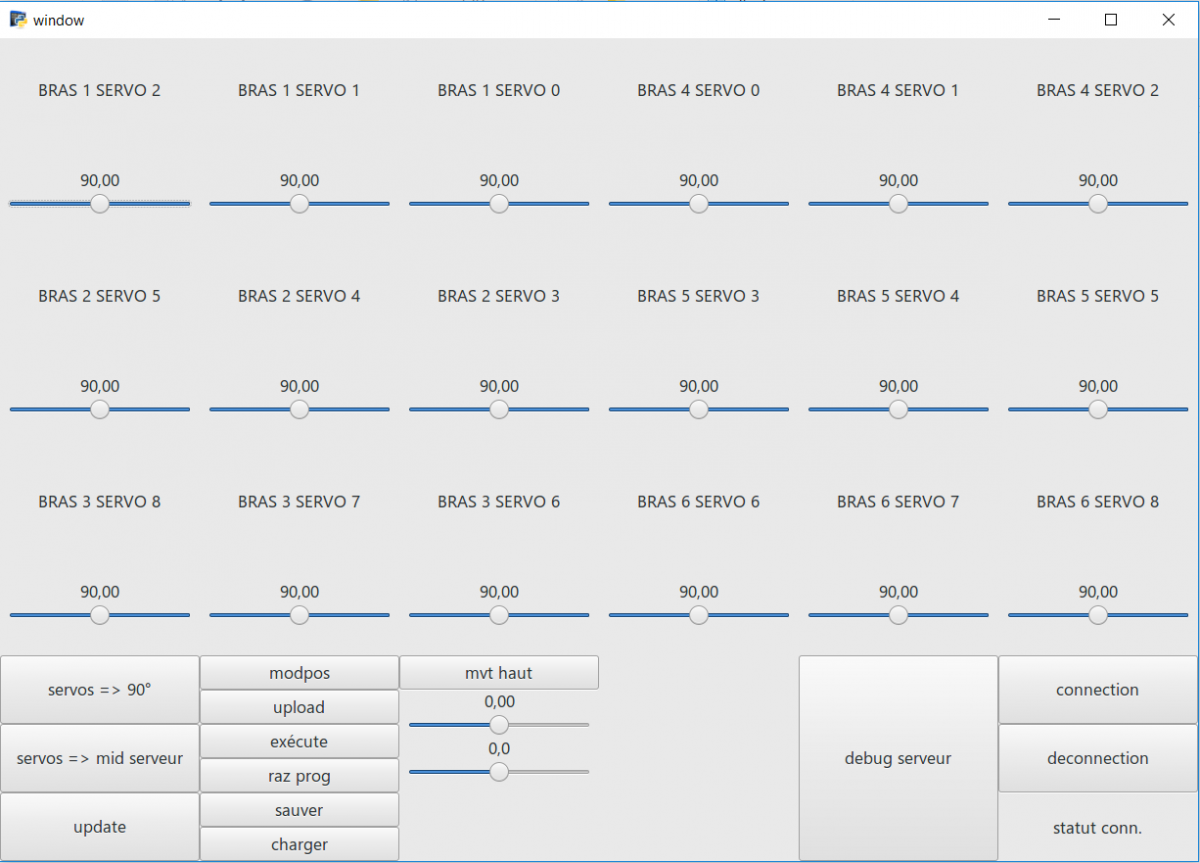
Pour faire bouger tout ça, pour le moment je fais tourner un serveur sur le raspberry de l'hexapode.Côté client, j'ai commencé à me faire une IHM toute simple pour debugger. Tout le calcul se passe côté client. J'envoie des trames à travers le réseau avec la position de chaque servos (ce n'est pas définitif, c'est vraiment pour débugger).
IHM client :
Maintenant que les servos sont étalonnés, que tout fonctionne correctement, je m'attaque à la cinématique inverse. Y'a pas mal de sources sur le net, donc je ne pense pas réinventer la roue (j'avoue que cette partie est plutôt tendue).
Voilou
A+