

Bonjour,
Je suis nouveau sur le forum et souhaiterais me lancer dans ce projet . Mon objectif est d'avoir un moteur qui tourne pour développer le pousse-seringue. Comme je débute, pour l'instant c'est un projet test qui se veut simple pour valider que ça peut fonctionner.
J'aurais de ce fait besoin de votre validation svp.
Après renseignements pris sachant que je débute, j'en arrive à proposer le montage suivant qui devrait correspondre à mes besoins : 1 pilote TB6600+1 Carte UNO+1 moteur NEMA17+1 alimentation12V400W:
Toutes mes recherches m'ont conduit à proposer les étapes suivantes :
>>Etape 1 :
Régler le microstepper TB6600 sur 2,8A (est-ce ok ?) et « Microstep » sur 16.
>>Etape 2, câblage :
- avec câble breadboards :
ENA-(ENA), DIR-(DIR) & PULL-(PULL) --> relié à l'un des ports GND de la carte Arduino Uno
ENA+(+5V) --> relié à DIGITAL PORT 8 de la carte Arduino Uno
DIR+(+5V) --> relié à DIGITAL PORT 7 de la carte Arduino Uno
PULL+(+5V)-- > relié à DIGITAL PORT 4 de la carte Arduino Uno
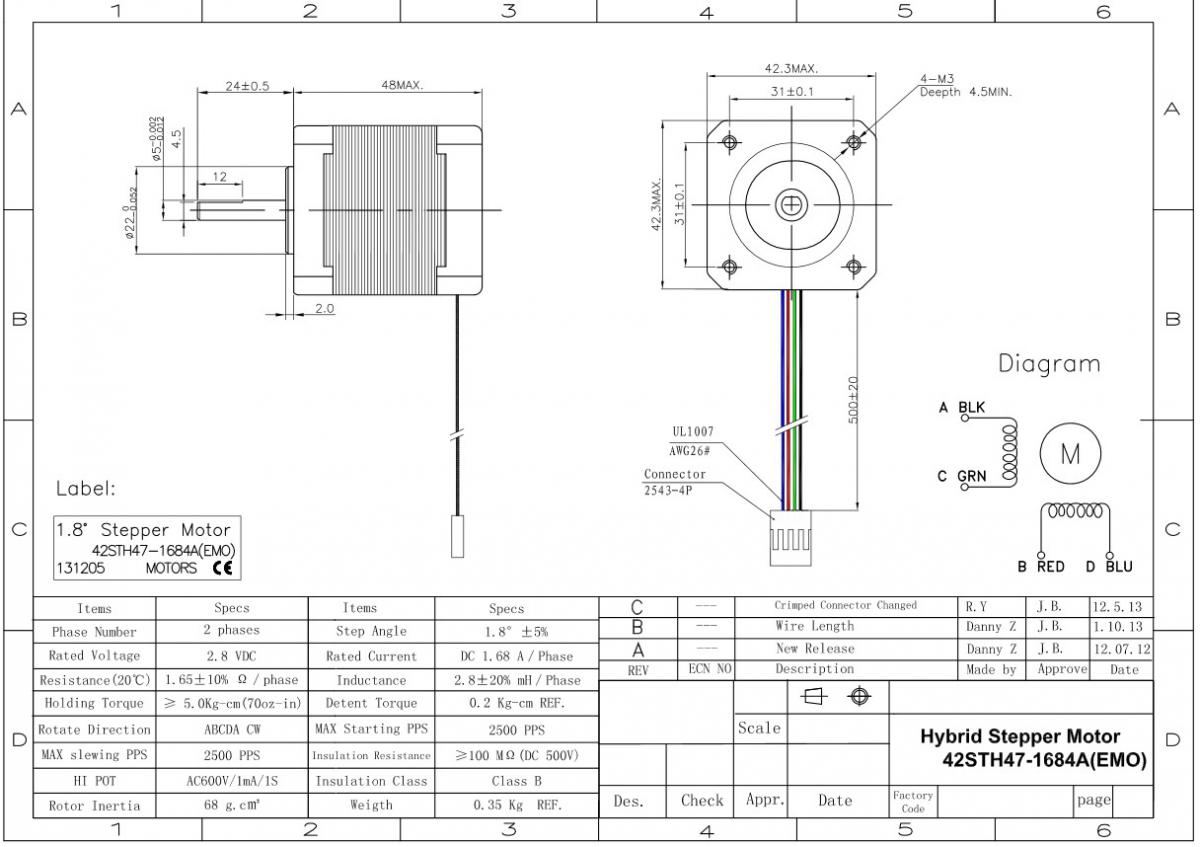
B- --> relié à câble bleu du moteur Nema
B+ --> relié à câble rouge du moteur Nema
A- --> relié à câble vert du moteur Nema
A+ --> relié à câble noir du moteur Nema
-avec câble fournis avec l'alim type 2.5 mm² :
GDN TB6600 > relié à V- de l'alimentation 12V400W
VCC --> V+ de l'alimentation 12V400W
>>Etape 3 Suite logicielle :
- 1/ télécharger GRBL 1.1 puis téléverser dans Arduino
- 2/ installer UGS version classic
>>>> je voudrais savoir si la gestion des pins comme branchés ci-dessus sera possible sans modification nécessaire des programmes ?
Tout ceci vous semble-t-il correct ?
Grand merci d'avance pour votre retour.
Bonne journée.



 )
)









