BOB4 !


Album photo complet
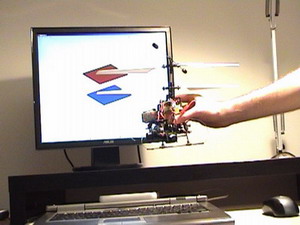
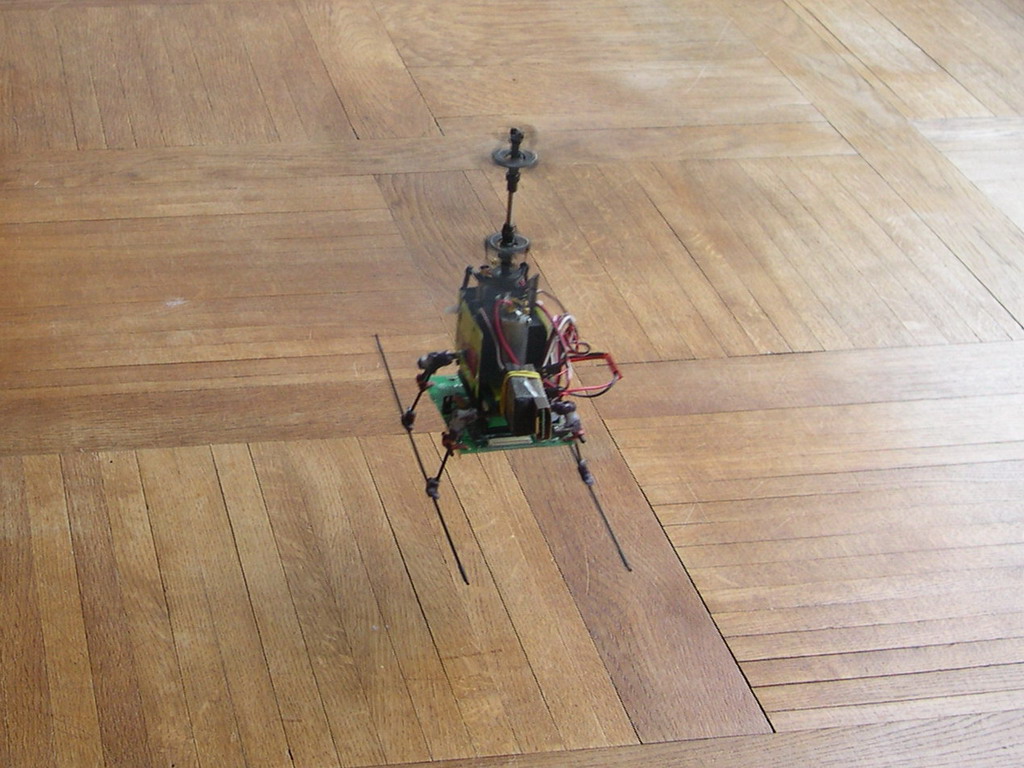
Bob 4 est un petit oiseau (hélico) de 260g seulement, qui ne sait pas encore voler autrement que guidé par son papa (=moi). Il a pour vocation de devenir un drone autonome d'intérieur. Après 5 mois de réflexions et de gestation, le voici enfin arrivé. Pour linstant, il ne sait rien faire. Je lui ai juste appris à suivre les ordres donnés par la télécommande. Ca montre quil est bien vivant, que tout fonctionne. Pour linstant, malgré la présence de nombreux capteurs, il ne voit pas, ne sent pas. Le pauvre Nous sommes donc au tout début de lapprentissage de BOB4, de sa programmation, ce qui sannonce long mais passionnant ! Lobjectif est bien de lui apprendre à voler de manière 100% autonome dans un environnement intérieur. Cest ambitieux, jassume !
Vous voulez en savoir plus ? Alors en vrac :
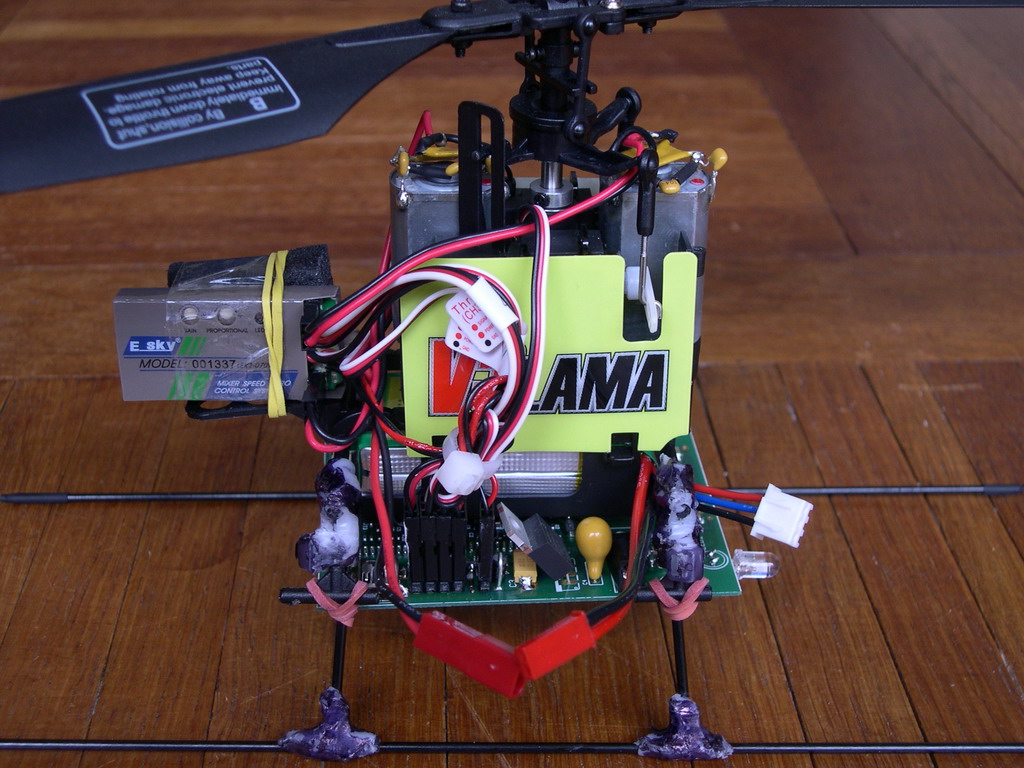
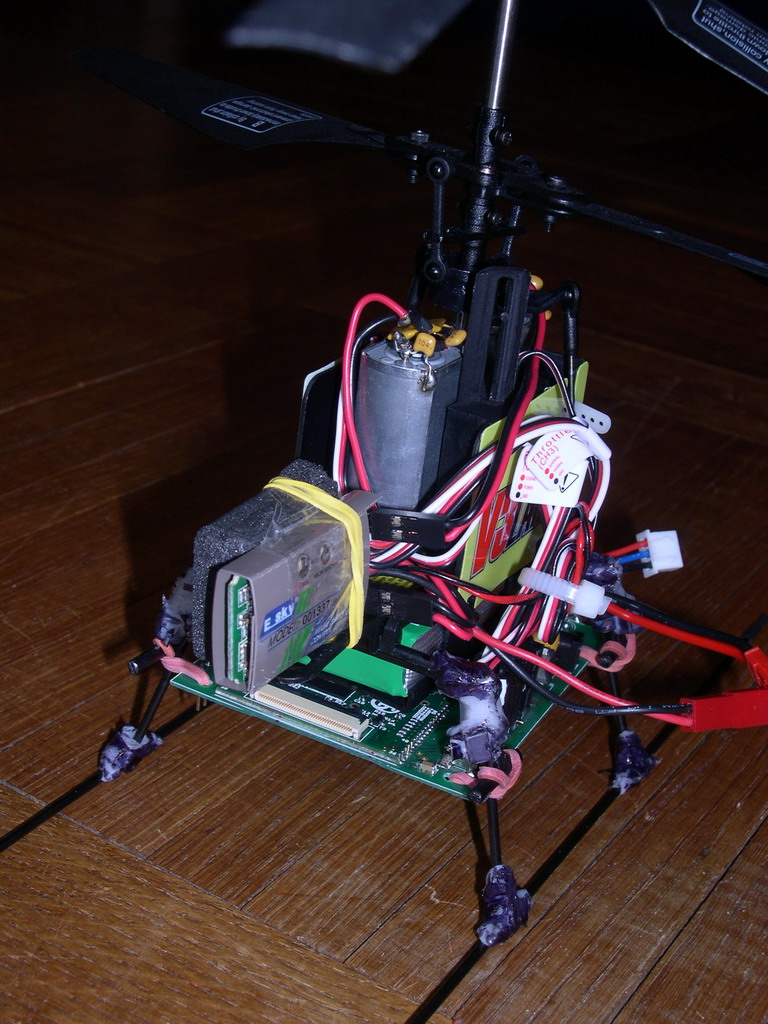
Base dhélicoptère bi-rotors LAMA V3 de chez E-Sky dépouillée des éléments décoratifs.
Train datterrissage fait maison avec des tiges en carbone pour rehausser loiseau et y loger lélectronique.
Module « 3 en 1 » de gestion des moteurs de chez E-Sky (mixer + gyro + variateur)
Carte mère « Embedded Master » de chez GHI-Electronics (ARM7TDMI + 8Mo RAM + 4Mo Flash) fonctionnant sous Microsoft .Net Micro-Framework.
Liaison radio : bi-directionnelle BlueTooth avec 2 modules Free2Move de forte puissance.
4 sonars SRF02
1 centrale inertielle 6 degrés de libertés de chez Sparkfun.
1 boussole électronique HMC6352
1 LED « haute luminosité » de 100mW, pour le fun.
1 alimentation externe 7V 50W pour débugger sans avoir à attendre la recharge des batteries. Jai du rajouter des gros condos de filtrage sur cette alim, car PWM et alim à découpage ça ne fait pas bon ménage
Les 2 PCB de BOB4 ont été dessinés par moi-même sous Eagle (version démo, sans routage automatique), et réalisés loin dici en Bulgarie chez Olimex, une entreprise que je recommande vivement. Verni épargne double face, trous métallisés, que du bon pour un tarif raisonnable.
Lélectronique de lémetteur radio (radiocommande) a été entièrement remplacée, pour y mettre un module bluetooth, un écran LCD 4x16 caractères, un microcontroleur programmé par mes soins, une liaison série (RS232) vers un PC, et quelques interrupteurs supplémentaires. Le tout fait maison dans le pur style Wrapping des ateliers Leon & Co. Lobjectif est davoir une seule et unique liaison radio pour toutes les données, que ce soit la programmation, lenvoi de consignes (texte), la commande manuelle, le retour dinformations (vers lécran de la radio ou vers le PC).
Lélectronique de la télécommande et de lhélico intègre une sécurité vitale : avec 1 switch de la télécommande, je peux couper la puissance quelle que soit létat de la carte mère, même totalement plantée. De même, la puissance se coupe en cas de perte de la liaison radio.
A bientôt jespère pour vous informer des progrès de mon bébé !
Leon.