Bonsoir cher communauté :crigon_03:/> ah ça fait du bien de publié à nouveau sur ce forum!
je vois que tonton Bernard ne veille plus sur ce forum, j’avoue que ça me manque (j'ai rien contre les nouveaux webmaster  />)
/>)
Ma toute 1er apparition dans une vidéo Neorobot , ou je poursuit enfin mon nouveau projet débuté y a 3ans de cela (comme quoi je lâche rien!):
(a quand l’intégration pour les vidéos dailymotion :/ )
http://www.dailymotion.com/neorobotane#video=xd2loh
Grâce a la donation de l'association Caliban je vous laisse découvrir:
passez en HD pour un meilleur rendu />/
dorénavant vous l'avez compris ça ne tien qu'a moi, si vous avez des questions n'hésiter surtout pas j'adore ça  />.
/>.
A bientôt pour la suite (qui prendra surement pas mal de temps).


Neorobot project revolution Caliban association donation
#1

-
- Membres
-

- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 25 juin 2013 - 04:23
- Tuc aime ceci
Suivez la naissance dIR bObOt
Léchec du Quadripode
#2
-

- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 01 juillet 2013 - 07:41
Je suis très heureux de voir que tu as finalement bien reçu notre colis et que tu comptes bien utiliser tous les éléments qui le compose dans tes projets délirants.
Surtout, fais-nous rêver !
- Tuc aime ceci
Esprit
*Rêve d'en caser un dans un robot*
#3
-

- Membres
- 85 messages
Membre
- Gender:Male
- Location:Languedoc-Roussillon
- Interests:Informatique, électronique, escalade
Posté 01 juillet 2013 - 08:26
Étudiant GEII - 1A
#5
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 02 juillet 2013 - 08:13
Bonjour Néo,
Je suis très heureux de voir que tu as finalement bien reçu notre colis et que tu comptes bien utiliser tous les éléments qui le compose dans tes projets délirants.
Surtout, fais-nous rêver !
Et moi de même Esprit, j’attendais ton passage justement
Je n'arrives pas à faire la liaison entre le titre et le contenu. Sinon, pas mal les vidéos.
Pour le titre beh c'est simplement le titre de mon nouveau projet qui consiste a réalisé un quadrupède +/- tout terrain, comme dans mon paye les servomoteurs n'existe pas, l association Caliban ma aidée, d'ou le titre, moi qui croyais bien expliqué dans la vidéo

Superbes vidéos !
Le déplacement de ce robot à quatre pattes est très original.
C'est un beau projet.
Bravo, et bon courage.
Merci ça motive! justement je voulais pas refaire ce qui était dèjas fait pour moi, un robot a patte doit pouvoir franchir les obstacles qu un robot roulent n'arriverais pas a franchir, sinon l’existence des pattes n'est pas justifier..
merci pour vos commentaire!
prinz metal
- Tuc aime ceci
Suivez la naissance dIR bObOt
Léchec du Quadripode
#6
-
- Membres
- 85 messages
Membre
- Gender:Male
- Location:Languedoc-Roussillon
- Interests:Informatique, électronique, escalade
Posté 02 juillet 2013 - 09:36
Pour le titre beh c'est simplement le titre de mon nouveau projet qui consiste a réalisé un quadrupède +/- tout terrain, comme dans mon paye les servomoteurs n'existe pas, l association Caliban ma aidée
Pourquoi ne pas en commander ? Désolé pour la vidéo, j'écoutais à moitié, erreur de ma part :/
EDIT : J'ai trouvé ma réponse "Parce qu'il est pour lui impossible de se procurrer les moindres pièces robotiques car manifestement, la carte Bleue n'est pas répendue là bas"
EDIT 2: Neo, tu es vraiment respectable, tu arrives à faire de superbes choses à partir de récupération
Étudiant GEII - 1A
#7
-
- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 11 juillet 2013 - 07:14
Esprit
*Rêve d'en caser un dans un robot*
#8
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 11 septembre 2013 - 11:49
Pour info, on parle aussi de toi sur le forum d'en face.
je viens juste de faire un tour, merci
sinon j essaye en ce moment d avancer un petit peu dans mon projet, donc j'ai une question en ce qui concerne les servomoteurs FUTUBA s3003...
dans le paquet il y avait deux vises de deux taille différents, + un petit machin en forme de cylindre:

les deux vises servent a fixé la crois sur l axe rotative du servomoteur, mais la quelle des deux choisir? et a quoi sert le petit cylindre?
j'ai peur de prendre le risque d essayer, l axe rotative du servo est en plastique une mauvaise manip risquera surement de l'endommagé et le rendre inutilisable,
donc merci de m éclairé

sinon une autre question pourquoi il n existe pas des servo dépassant le 180° ?
Suivez la naissance dIR bObOt
Léchec du Quadripode
#9
-

- Membres
-
- 143 messages
Membre occasionnel
- Gender:Male
- Location:Normandie
- Interests:Robots humanoides.
Posté 12 septembre 2013 - 08:25
L'une des raisons principales tient à la limitation des potentiomètres qui donnent le feedback pour la position du palonnier. Ce sont des résistances variables en demi-cercle. Faire un cercle complet est impossible, mais c'est vrai qu'ils pouraient faire plus que 180 degrés, par exemple trois quarts de cercle. Peut-être que le demi-cercle permettrait d'avoir un potentiomètre standard pour des servos différents ayant des rapports de réduction différents. En tous cas, cette limitation à 180 degrés, parfois seulement 170 ou 160 degrés, est assez contraignante.une autre question pourquoi il n existe pas des servo dépassant le 180° ?
#10
-

- Membres
-
- 411 messages
Habitué
Posté 12 septembre 2013 - 08:52
une autre question pourquoi il n existe pas des servo dépassant le 180° ?
Si, ça existe bel et bien. C'est ce qu'on appel un servo-treuil.
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#11
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 12 septembre 2013 - 06:22
L'une des raisons principales tient à la limitation des potentiomètres qui donnent le feedback pour la position du palonnier. Ce sont des résistances variables en demi-cercle. Faire un cercle complet est impossible, mais c'est vrai qu'ils pouraient faire plus que 180 degrés, par exemple trois quarts de cercle. Peut-être que le demi-cercle permettrait d'avoir un potentiomètre standard pour des servos différents ayant des rapports de réduction différents. En tous cas, cette limitation à 180 degrés, parfois seulement 170 ou 160 degrés, est assez contraignante.
justement, les potentiomètres dépasse généralement les 180°... c'est pour sa que je ne vois pas pour quelle raison sont-ils limiter a 60°, c'est toujours mieux quand méme d avoir plus...
Si, ça existe bel et bien. C'est ce qu'on appel un servo-treuil.
je connaissais pas se genre de servo... j'ai cherché sur internet j'ai vus qu'ils arrivent a faire plusieurs tours, alors comment ça se passe pour le contrôle?
est-ce le même principe que pour les servo standard? c'est a dire: le servo prend une position en fonction de la langueur temporelle d une impulsion.
et sinon pour la photo que j'ai publié quelle vise doit-je choisir ?
voila merci
Suivez la naissance dIR bObOt
Léchec du Quadripode
#12
-
- Membres
-
- 143 messages
Membre occasionnel
- Gender:Male
- Location:Normandie
- Interests:Robots humanoides.
Posté 12 septembre 2013 - 08:48
La petite vis est celle qu'il faut mettre au centre de l'axe pour fixer le palonnier (croix).sinon pour la photo que j'ai publié quelle vise doit-je choisir ?
La grande vis sert à fixer les bras (certains disent les oreilles) du servo qui sont sur les côtés. Dans les paquets neufs, il y a 4 grandes vis et une seule petite vis, comme on peut le voir sur certaines photos de sites marchands.
#13
-
- Membres
-
- 411 messages
Habitué
Posté 12 septembre 2013 - 08:49
justement, les potentiomètres dépasse généralement les 180°
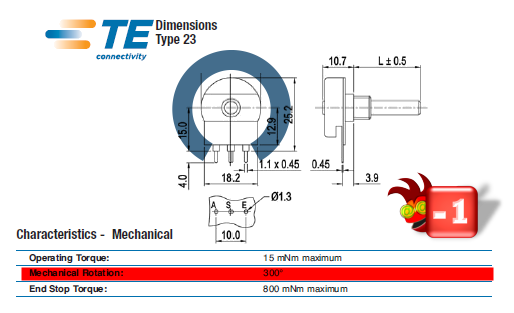
Heu...non un potentiomètre rotatif classique ne peut pas faire 180° la faute à sa conception interne (une piste en forme de Ω)
Sur cette photo on voit bien comment est fait le potar à l'interieur (composant au milieu en haut):

On remarque bien le curseur argenté (point milieu) qui glisse sur une piste carbone en forme de Ω il ne peut pas faire une révolution totale...presque mais non!
je connaissais pas se genre de servo... j'ai cherché sur internet j'ai vus qu'ils arrivent a faire plusieurs tours, alors comment ça se passe pour le contrôle?
est-ce le même principe que pour les servo standard? c'est a dire: le servo prend une position en fonction de la langueur temporelle d une impulsion.
Oui même principe que pour un servo classique sauf que dans le servo-treuil le potar classique est remplacé par un trimmer multitour.
- transistance aime ceci
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#14
-
- Membres
-
- 297 messages
Troll Archiviste
- Gender:Male
- Location:FRANCE
- Interests:La robotique et la méchanceté gratuite... mais il faut savoir tourner la page .
Posté 13 septembre 2013 - 10:52
Heu...non un potentiomètre rotatif classique ne peut pas faire 180° la faute à sa conception interne (une piste en forme de Ω)
...
Heu... c'est affreusement gênant pour moi, mais je suis contraint de ne pas faire de hors sujet

 ...mais c'est quoi ce nom neo ?
...mais c'est quoi ce nom neo ?Pourtant, la référence à oméga était parfaitement correcte
 ... faute d'inattention .
... faute d'inattention . Et je frappe encore une fois d'un -1 qui veut dire BET@.M@@@@@@@@@X .....
Image(s) jointe(s)

"L'intelligence artificielle servira de prothèse à la bêtise humaine !!"
"l'être humain est une machine irrationnelle occasionnellement logique ..."
#15
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 13 septembre 2013 - 11:23
Heu... c'est affreusement gênant pour moi, mais je suis contraint de ne pas faire de hors sujet
ah dommage! j'aurais adoré voir ce que t aurais pu inventer comme hors sujet XD.
Heu... c'est affreusement gênant pour moi, mais je suis contraint de ne pas faire de hors sujet
Voilà, La documentation de monsieur TE connectivity a parlé, et elle donne raison à Prinz Metal ex-Neo
beh, oui! y a de quoi dépassé les 180° largement!
...mais c'est quoi ce nom neo ?
Quelle partie te déplaît? Prinz metal ou EX neo?

- BET@.M@X aime ceci
Suivez la naissance dIR bObOt
Léchec du Quadripode
#16
-
- Membres
-
- 411 messages
Habitué
Posté 13 septembre 2013 - 11:37
Ben oui voilà ce qui se passe quand on passe son aprem dans les sables mouvant de l'administration...on y laisse sa santé mentale (si si j'en avait une avant c'est promis) !

Bref je pensait 360, j'ai écrit 180...
- BET@.M@X aime ceci
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#17
-
- Membres
-
- 297 messages
Troll Archiviste
- Gender:Male
- Location:FRANCE
- Interests:La robotique et la méchanceté gratuite... mais il faut savoir tourner la page .
Posté 13 septembre 2013 - 02:26
Mea culpa...
Transistance , tu as fait vibrer en moi la corde détendue de ma compassion ...

 ...Et il donne un +1 qui veut dire aussi BET@.M@@@@@@@@@X
...Et il donne un +1 qui veut dire aussi BET@.M@@@@@@@@@X
Image(s) jointe(s)

"L'intelligence artificielle servira de prothèse à la bêtise humaine !!"
"l'être humain est une machine irrationnelle occasionnellement logique ..."
#18
-
- Membres
-
- 297 messages
Troll Archiviste
- Gender:Male
- Location:FRANCE
- Interests:La robotique et la méchanceté gratuite... mais il faut savoir tourner la page .
Posté 13 septembre 2013 - 02:41
Quelle partie te déplaît? Prinz metal ou EX neo?
Mais aucune des deux PRINZ METAL EX-NEO
 ...on dirait un nom de groupe de hard rock
...on dirait un nom de groupe de hard rock c'est juste que si tu veux encore changer pour un nom plus cool (ça parait difficile mais c'est une hypothèse de travail ...
), ça risque juste de faire un peu long à lire :

Non, si je devais vraiment critiquer quelque chose, ce serait plutôt cette publicité subliminale pour Peugeot contenue dans ton superbe avatar ...

Voila ce que j'appelle un hors sujet ...
Image(s) jointe(s)


"L'intelligence artificielle servira de prothèse à la bêtise humaine !!"
"l'être humain est une machine irrationnelle occasionnellement logique ..."








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

