

Objectif : apprendre à utiliser un capteur à ultrasons HC-SR04.
Difficulté : 1/5
Temps d'exécution : 15 min
Matériel nécessaire :
- Une carte arduino uno
- Un capteur à ultrasons HC-SR04 <= 2,70€ seulement!
- 4 fils mâle femelle et 3 fils mâle mâle
- Un servo moteur 9g
Les capteurs à ultrasons sont beaucoup utilisés sur les robots. Ils permettent de détecter les obstacles à distance et on peut ainsi demander au robot de les éviter, c’est bien pratique !
Je vous présente quelques robots du robotscope qui utilisent des capteurs ultrasons :

Il s'agit de PLR1 et du robot Quiby.
Le fonctionnement du capteur à ultrason :
Si c’est la première fois que vous utilisez ce genre de capteur, voici quelques éléments pour vous familiarisez avec.
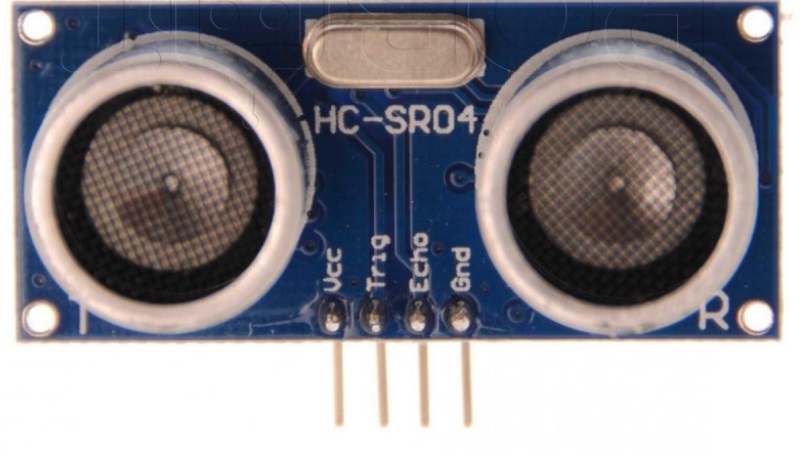
Le capteur que j’utilise est un HC-SR04 (datasheet dans la description), il a 4 broches : l’alimentation(5V), la masse, le signal de l’émetteur (Trig) et le signal du récepteur (Echo).
Le montage avec la carte Arduino est le suivant :
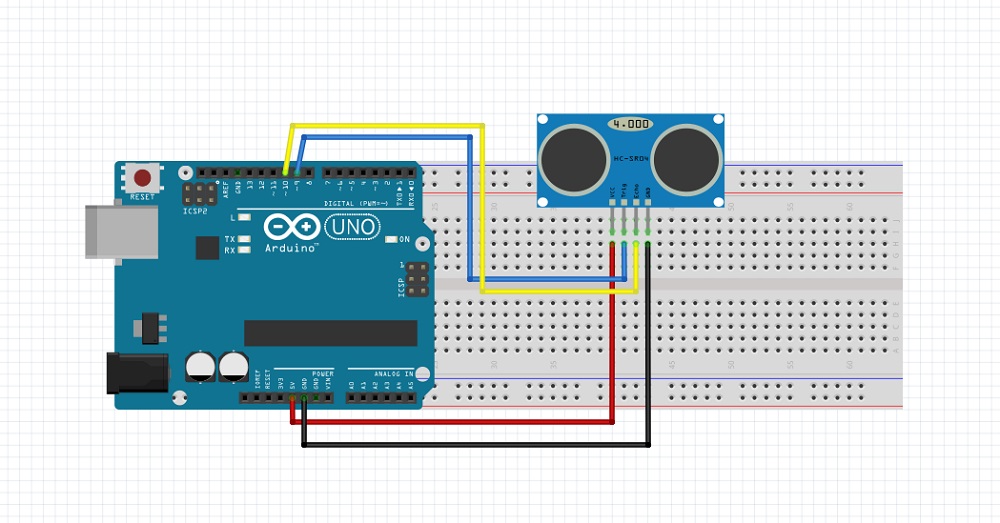
Il faut brancher le “Trig” du capteur sur une entrée numérique et le “Echo” sur une sortie numérique de la carte Arduino.
Le fonctionnement du capteur :
- il faut émettre un signal à l’état haut de 10µs sur le Trig pour activer l’envoie d’une salve d’ultrason
- l’émetteur émet un signal à l’état haut lorsque la salve est reçue.
Comment calculer la distance de l’objet détecté ?
Pour cela, il faut mesurer le temps du signal à l’état haut du récepteur.
Cette valeur doit ensuite être divisée par deux (le signal fait un aller-retour) et multipliée par la vitesse du son dans l’air (340m/s).
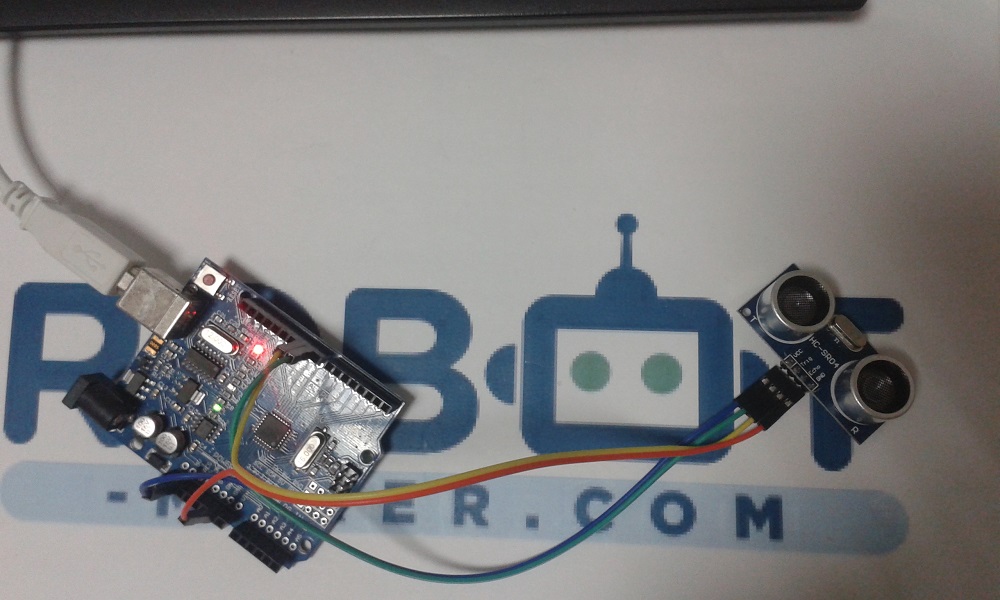
On peut placer un obstacle devant le capteur afin de vérifier son fonctionnement.
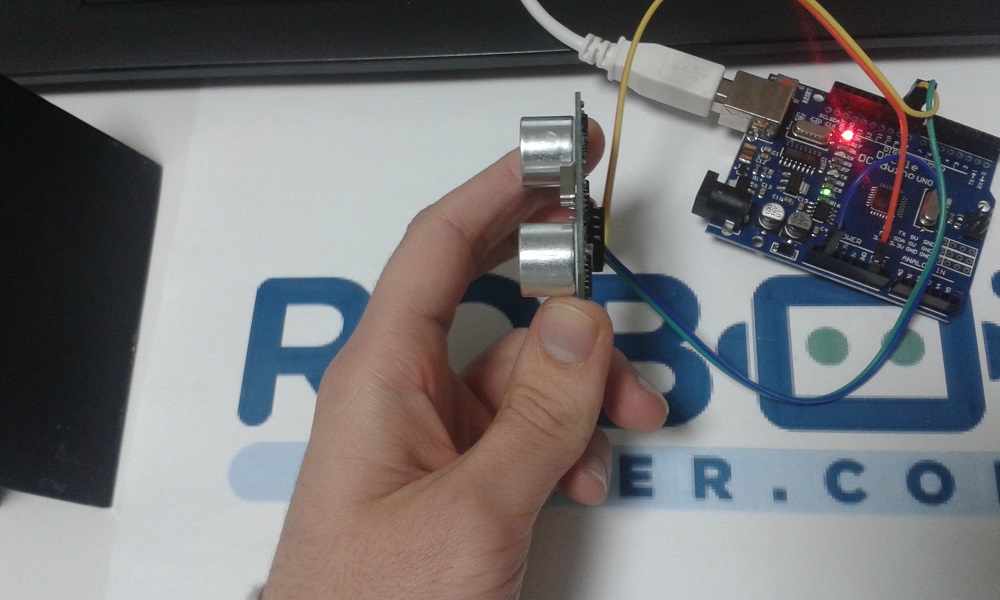
Mais il faut d’abord mettre le programme dans la carte Arduino.
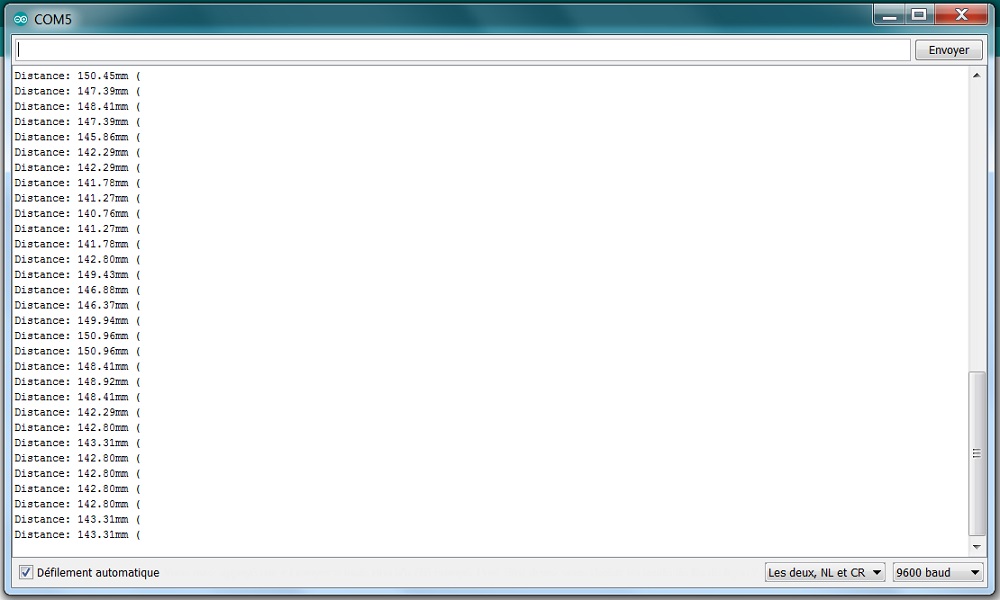
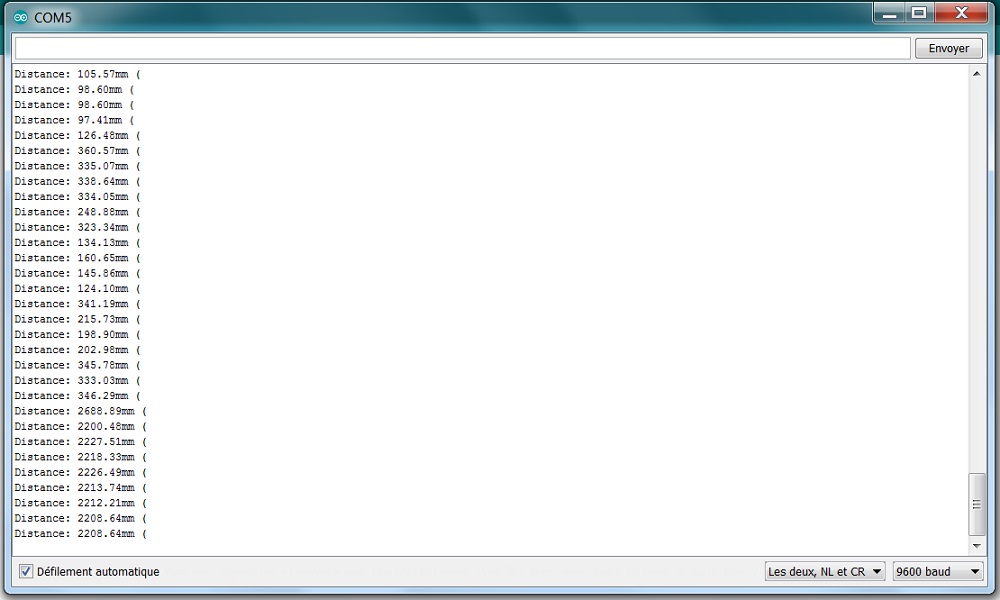
Voici les résultats obtenus avec des obstacles plus ou moins éloignés du capteur. Les résultats sont observés à l’aide du moniteur série de l’Ide Arduino.
Ce capteur ultrason possède un cône de détection d’environ 15°, il est donc parfois utile dans mettre plusieurs sur votre robot pour couvrir une plus large zone, ou bien dans mettre un mobile (sur un servo moteur par exemple).
Montage capteur à ultrason + servo moteur :
Nous allons maintenant récupérer des données avec un capteur HC-SR04 monté sur un servo moteur.
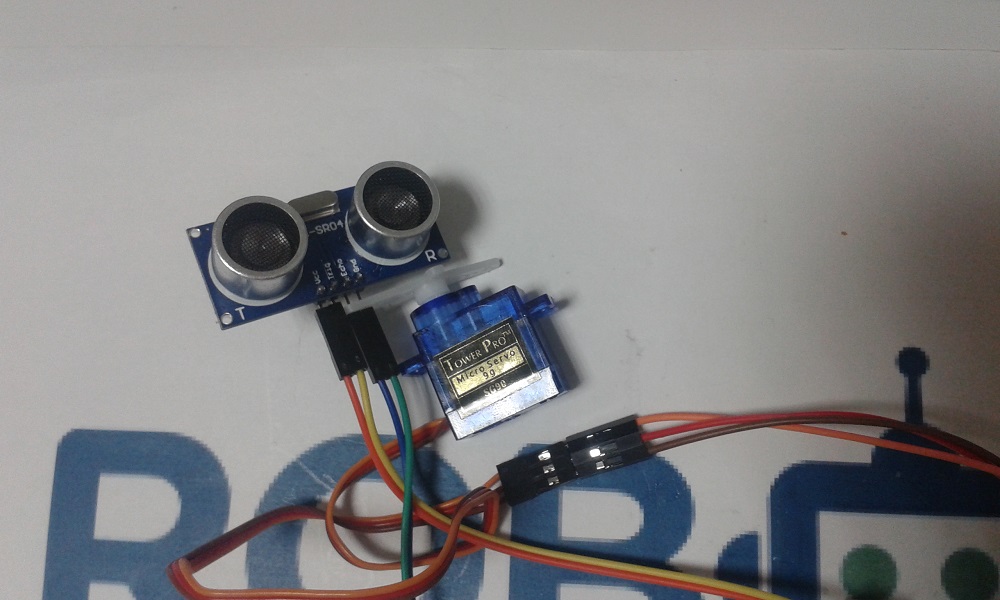
On ajoute au montage précédent un servo moteur 9g comme ceci :
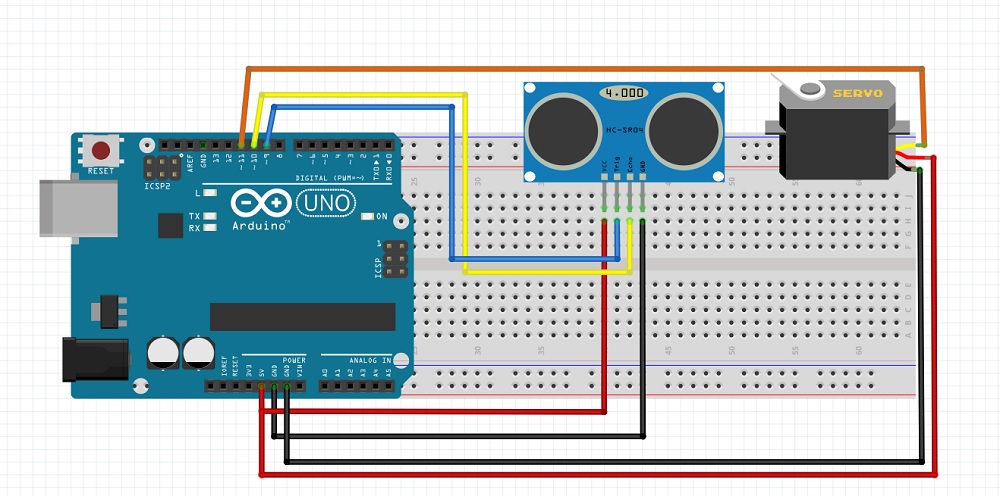
Je me suis servi des trous dans l'accessoire fixé à la tête du servo moteur et des broches du capteur pour les maintenir entre eux.
Il faut ajouter dans le programme quelques lignes permettant de contrôler le servo moteur.
Avec ce programme, le servo moteur effectue une rotation de 180° ce qui permet au capteur à ultrasons d'avoir une vision plus large de l'espace dans lequel il est, et de pouvoir détecter des obstacles autour d'un robot.
Une fois le code téléversé, voila le résultat :
Les capteurs ultrasons n'ont plus de secret pour vous maintenant !
Maintenant vous pouvez créer une ceinture de capteurs ultrasons pour vos robots !

bonjour merci je cherche un code complet d un robot voiture a 2 moteurs coninue un sevomoteur capteur HC-SR04 un pilot moteur L293D si possible. Merci
Bonjour, pour ce genre de demande le plus simple est d'aller directement sur le forum ! En tapant les bons mots clés dans la barre de recherche en haut tu trouveras beaucoup d'informations ! Exemples : http://www.robot-maker.com/forum/topic/9387-programme-rea-rover-dexploration-autonome/page-2 http://www.robot-maker.com/forum/topic/9063-arduino-et-android/?p=58783 http://www.robot-maker.com/forum/topic/3041-pont-en-h-avec-l293d/ De plus en te présentant toi et ton projet, et en posant des questions tu trouveras toute l'aide nécessaire au sein de la communauté ! =) Donc n'hésite pas et à bientôt !
Hello! super article! J'aime surtour les exemples d'utilisation avec le servo moteur. Je trouve juste dommage de ne pas expliquer comment marche le capteur en interne. J'ai trouvé cet article qui explique quelle est la physique derrière le capteur, je partage au cas ou ça interesse: https://www.atrakeur.com/blog/diy/comment-utiliser-un-capteur-a-ultrasons-hcsr04-avec-arduino/ En tout cas continue, j'aime beaucoup le format et la recherche derrière ton travail.