

Objectifs : construire une carte électronique afin de connecter plusieurs capteurs ultrasons et réaliser un "sonar".
Difficulté : 3.5/5
Temps d'exécution : 1h30
Matériel nécessaire :
- Une veroboard
- Une carte arduino nano clone
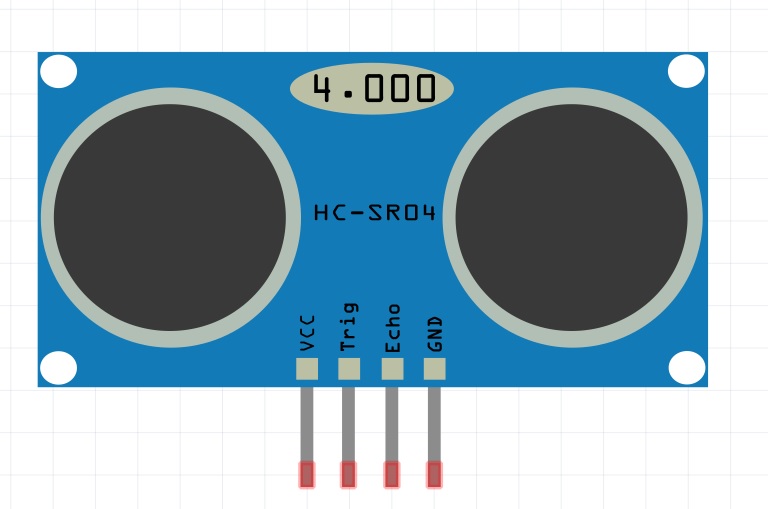
- 6 à 8 capteurs ultrasons HC-SR04
- Connecteur femelle droit en barrette, 54 pôles et connecteur mâle droit en barrette, 12 pôles
- Une station de soudage
- Fils monobrins
- Une bobine d'étain
Les capteurs ultrasons sont parfaits pour détecter la distance d'un obstacle par rapport à votre robot ou autres machines mobiles. Ils ont déjà fait l'objet d'un premier tutoriel, qui vous expliquait comment utiliser un capteur HC-SR04. Mais si vous voulez augmenter le champ de vision de votre robot, il suffit d'en mettre plusieurs. Nous allons voir ensemble comment faire une carte qui facilite leur connexion à un microcontrôleur.
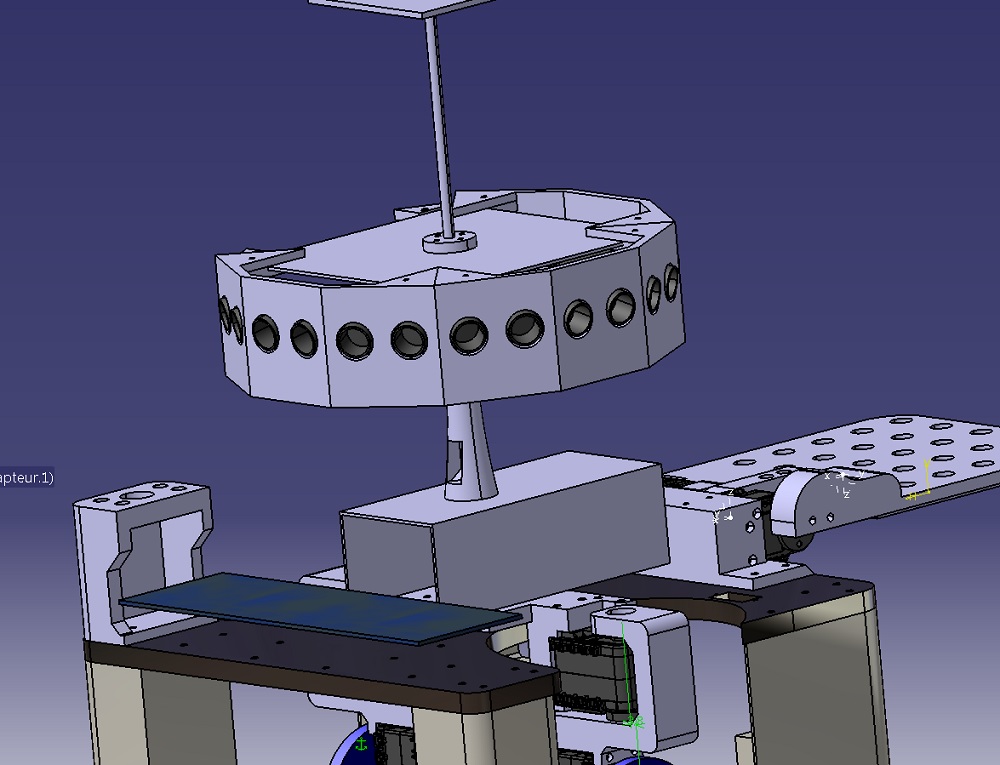
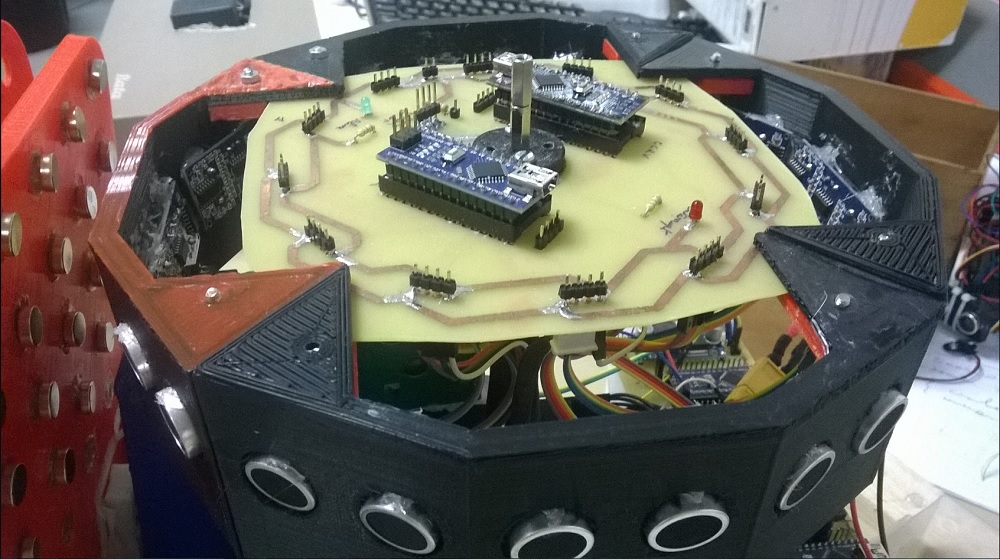
Les ceintures d'ultrasons sont très utiles, notamment pour la coupe de France de robotique où aucun contact avec le robot adverse n'est autorisé. Ci-dessus, l'image du robot de l'association ESTIA SYSTEM qui a participé l'année dernière.
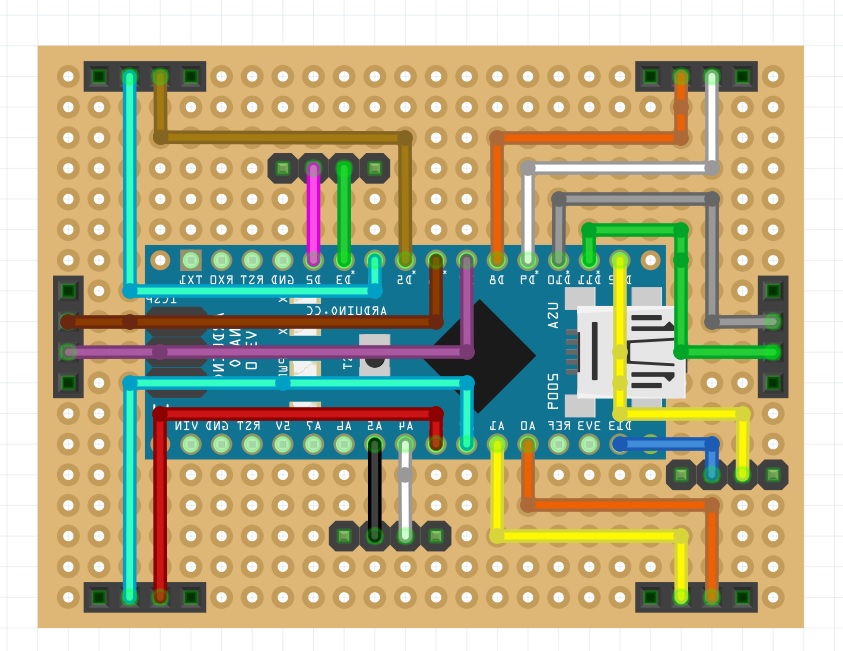
Routage des capteurs ultrasons et de la veroboard :
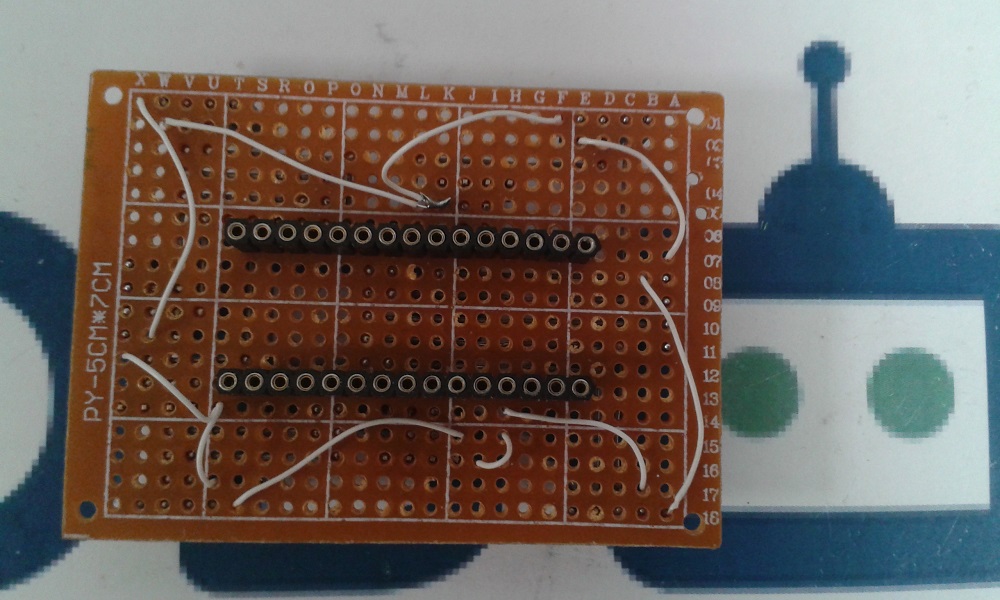
Face recto de la ceinture de capteurs ultrasons
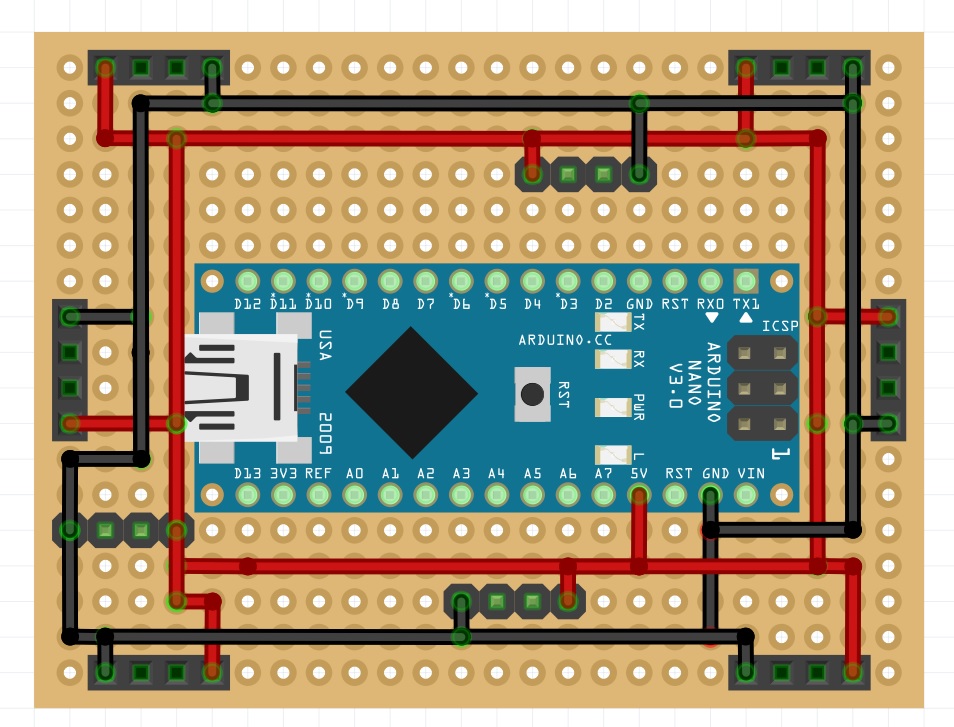
Tout d'abord, il faut réaliser le routage de la veroboard qui va permettre de fixer tout les connecteurs. La veroboard que j'utilise ne possède qu'une face cuivrée mais nous allons tout de même utiliser les deux faces de la carte.
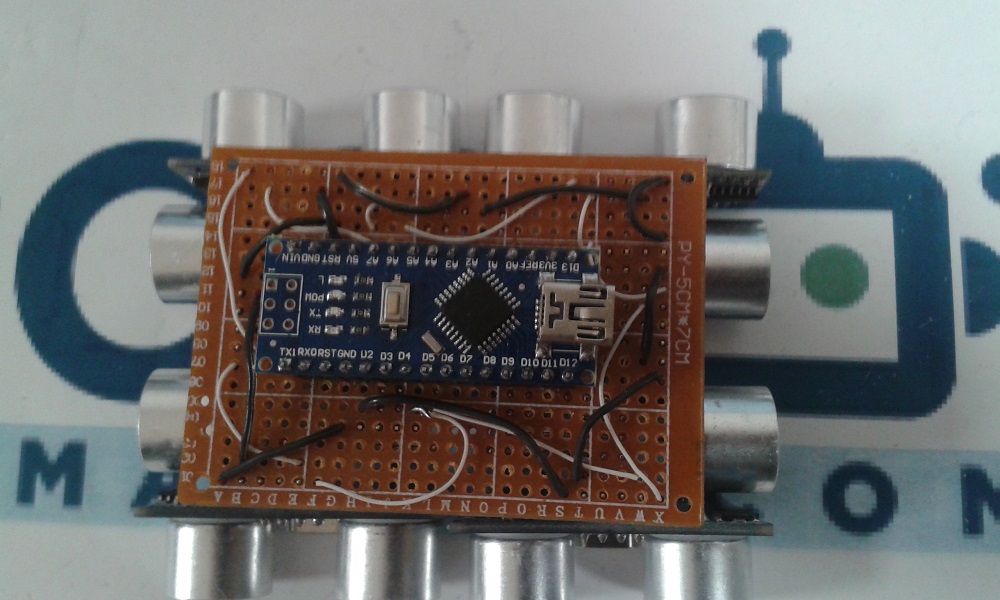
Sur la face recto (non cuivrée) de la veroboard, c'est le câblage qui permet l'alimentation de tous les capteurs. Ils sont connectés en série à la carte arduino nano. Sur cette face, il y aura la carte arduino.
Les broches du capteur à ultrasons sont dans cet ordre (de gauche à droite) : VCC, TRIG, ECHO, GND.
Comme les capteurs seront tournés vers l'extérieur de la carte, attention à ne pas se tromper de sens sur la face verso de la veroboard !
(lien de téléchargement du routage de la ceinture ultrasons face recto)
Face verso de la ceinture de capteurs ultrasons
Sur la face verso (cuivrée) de la veroboard, le routage des signaux de sortie des capteurs et des entrées de la carte est réalisé. Sur cette face, il y a les capteurs ultrasons et leurs connecteurs (mâle et femelle).
(lien de téléchargement du routage de la ceinture ultrasons face verso)
Des connecteurs femelles droits sont utilisés aux emplacements des capteurs ultrasons. Ceux-ci pourront directement ce fixer dessus. Les connecteurs mâles permettent d'ajouter deux capteurs ultrasons supplémentaires via des fils et une interface de communication I2C via des fils (sur les broches A4 et A5).
Soudure de tous les connecteurs sur la veroboard :
Les connecteurs de la face recto
D'abord, il faut souder les connecteurs de la carte arduino nano. Pour m'aider, j'utilise une troisième main mécanique pour maintenir les connecteurs.
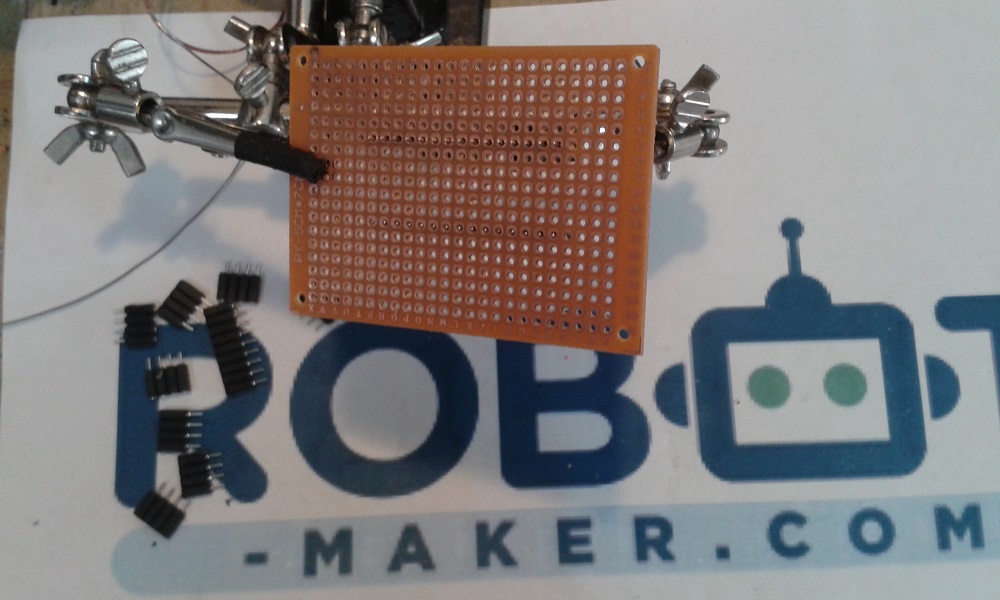
Une fois les connecteurs mis en place, il n'y a plus qu'a faire un point de soudure sur chaque broche de la carte arduino (si vous débutez, ce tutoriel sur la soudure peut peut être vous aider).
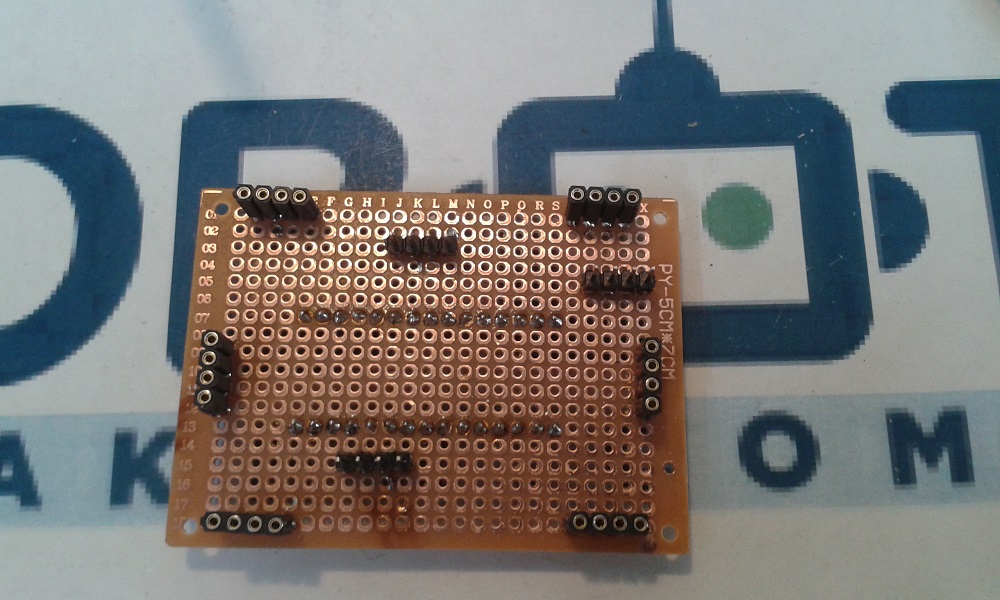
Face recto
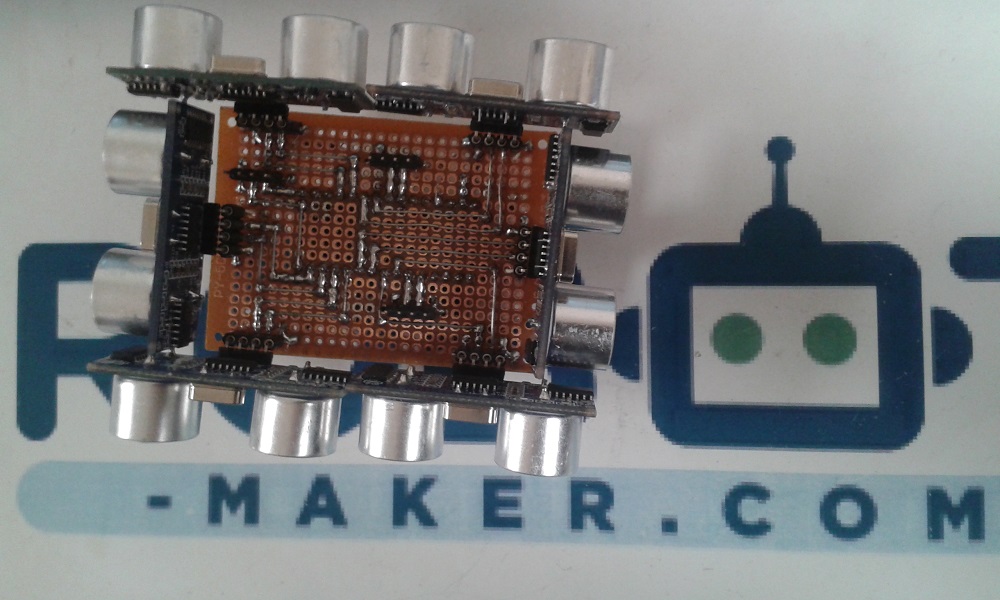
Face verso
Lors des soudures, pour éviter de vous tromper, référez-vous au schéma de routage présenté au début du tuto.
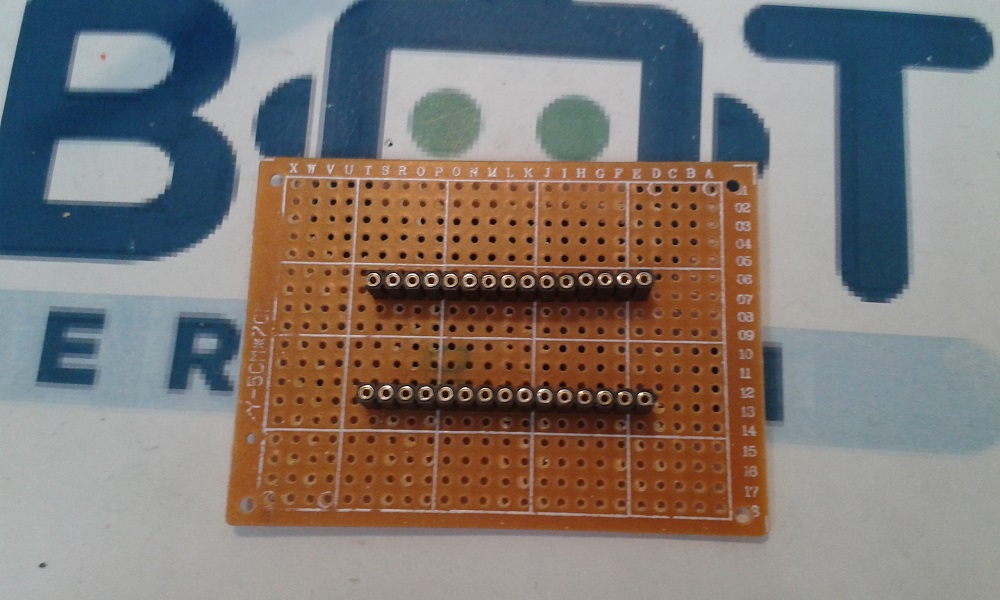
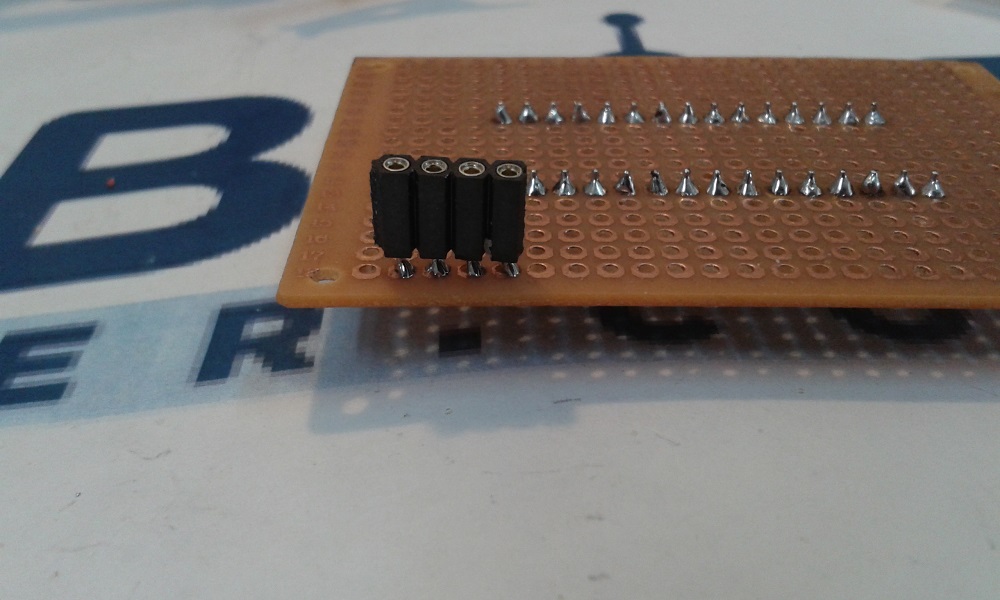
Les connecteurs de la face verso
Sur cette face, il faut souder les connecteurs qui viendront accueillir les capteurs HC-SR04. La difficulté est qu'il n'y a pas de cuivre sur la face opposée, les soudures doivent donc être sur la même face que les connecteurs (à la différence des connecteurs de la carte arduino).
L'astuce est de surélever légèrement les connecteurs afin de les souder correctement. Il faut commencer par souder une broche sur les quatre de chaque connecteur pour pouvoir le redresser si jamais il n'est pas droit.
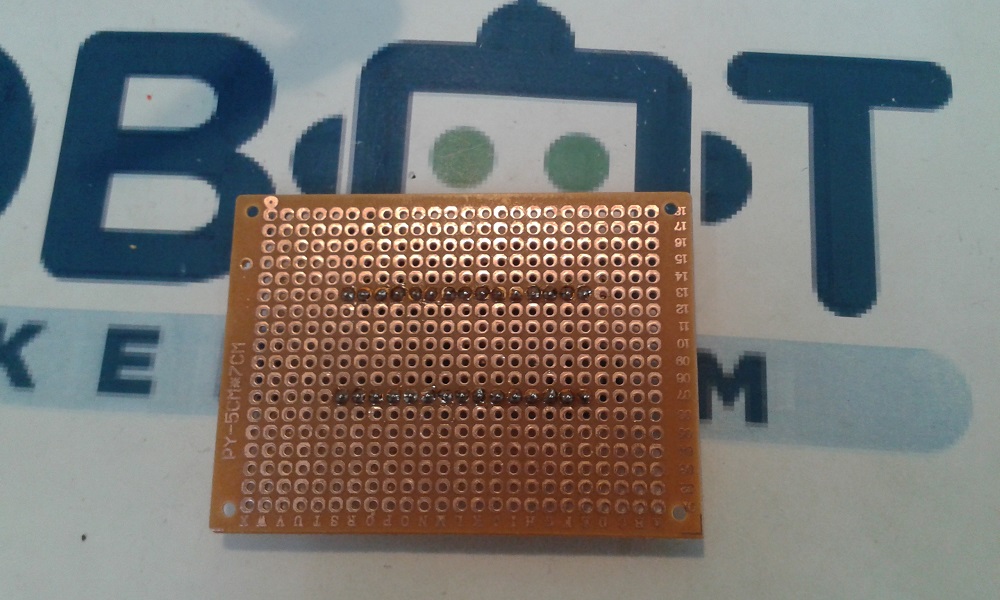
Réalisation des pistes de la ceinture de capteurs ultrasons :
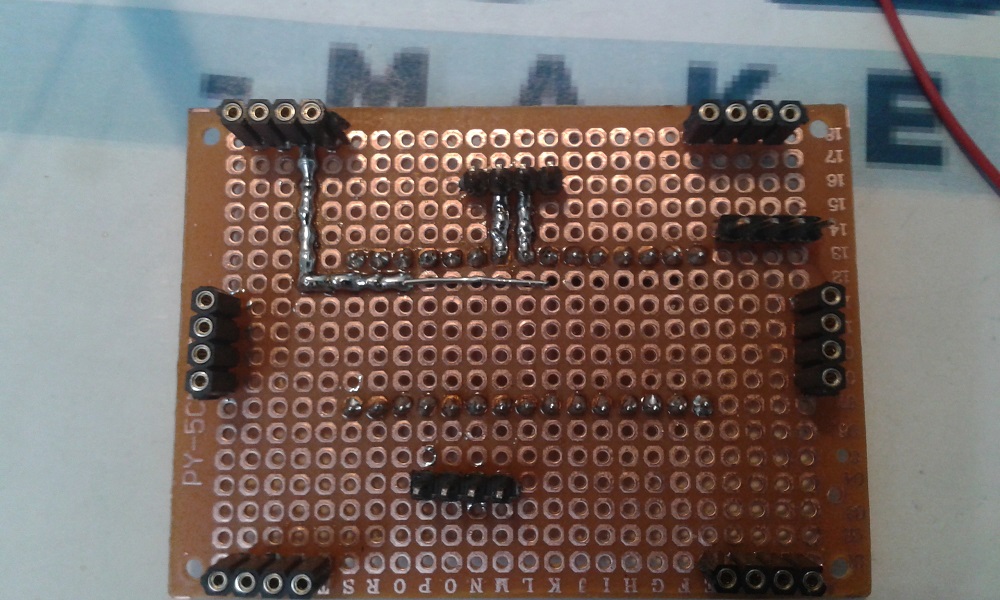
Les pistes de la face verso
Lorsque tous les connecteurs ont été soudés sur la veroboard, il est temps de passer à la réalisation des pistes !
Pour réaliser les pistes, deux techniques sont possibles :
- Soit en utilisant uniquement de l'étain entre chaque pastille pour les reliées, ce n'est pas très esthétique et parfois un peu compliqué.
- Soit en dénudant totalement un fil monobrin et en le soudant a ses extrémitées, auquel cas juste deux soudures sont nécessaires.
J'utilise les deux techniques, lorsque la distance entre les pastilles à reliée est courte (2 ou 3 pastilles), je n'utilise pas de fils.
Les premières pistes sont faites, il reste à faire les autres !
Un conseil pour ceux qui se sont trompés dans le soudage de certaines pistes (comme moi....), ne recommencez pas tout ! L'erreur est rattrapable avec une tresse à dessouder, et quelques astuces sont données dans ce tutoriel pour savoir comment dessouder un composant.
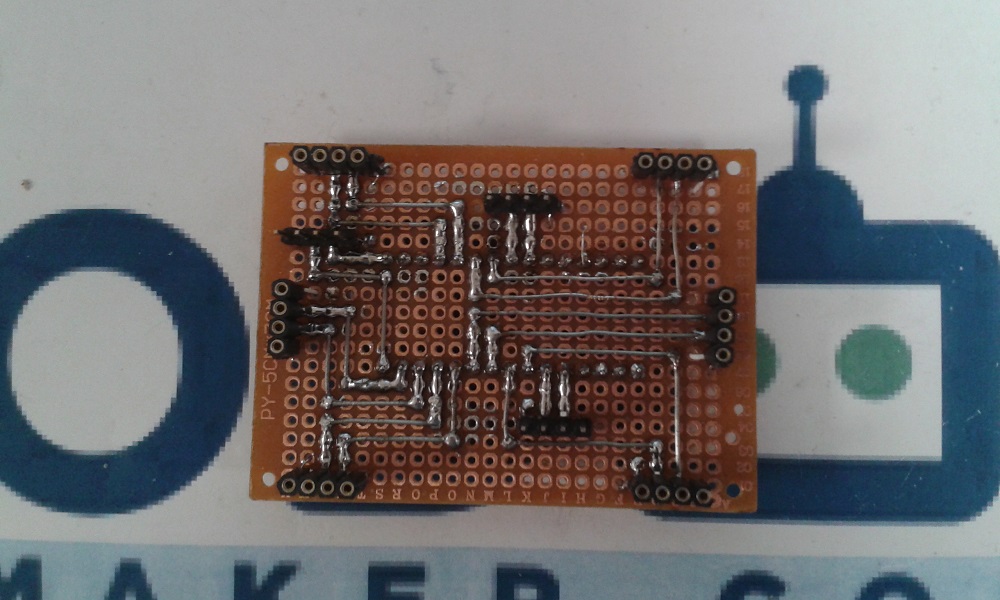
Les pistes de la face recto
Lors de la conception du schéma de routage, nous avons pris le soin de laisser libres les pastilles en face des broches des connecteurs servant au connections du 5V et de la masse. Cela va permettre de faire passer les fils de la face recto pour les souder aux broches correspondantes.
Vous pouvez faire passer le fil du coté des connecteurs des capteurs HC-SR04 et les souder à la pastille puis compléter en reliant avec de l'étain la pastille avec la broche du connecteur.
Et voilà ! Vous avez réalisé une carte pour une ceinture de capteurs ultrasons !
Il ne vous reste plus qu'a utiliser un multimètre en mode testeur de continuité pour voir s'il n'y a pas de court circuit entre les pistes et le tour est joué !
Programmation de la ceinture de capteurs ultrasons :
Après une étape de soudure qui c'est bien déroulée (je n'en doute pas !), la partie programmation de la carte arduino nano ! Ci-dessous, voici un programme permettant de gérer les 6 capteurs ultrasons présents sur la carte.
Ce programme utilise la librairie "NewPing" qui permet de faciliter l'utilisation des capteurs à ultrasons. Cela nous dispense du calcul de la distance grâce à la lecture de l'impulsion renvoyée par le récepteur du capteur et réduit la longueur du code !
Chaque capteur est définit à partir de la ligne 24 à 29 avec l'instruction "NewPing" et le numéro des broches du récepteur, de l'émetteur et la distance maximale de détection que l'on veut.
Il faut ensuite appeler la fonction ping.cm() comme à la ligne 41 pour obtenir la distance mesurée par le capteur choisi.
Pour gérer 8 capteurs, il n'y a que quelques petites lignes à ajouter !
Il suffit donc d'ajouter une ligne pour définir chaque capteur à mettre en plus et de modifier l'affichage en conséquence.
Votre carte à ultrasons est désormais opérationnelle et prête à être placée sur votre robot !
Pourquoi ne pas utiliser cette ceinture de capteurs HC-SR04 pour faire un robot autonome avec ce kit de robot à chenille ? J'espère que ce tutoriel vous a aidé et n'hésitez pas à poser des questions sur le forum !
Bonjour,je Souhaiterais réaliser un capteur de mesure 3 axes (x,y,z) avec 3 cap. HC SR04 qui fait parti d' un ensemble mécanique pour ma maison (brevet possible) pouvez vous m'aider sur le montage et le programme.je souhaite enregistré des données et visualiser celle ci à distance pouvez vous me faire devis , Urgent merci Cordialement, Mr Mahjoub
Bonjour, il nous faudrait un peu plus de détails pour étudier cela mais dans l'idée oui nous réalisons ce genre de prestation. Envoyez nous un mail à contact@robot-maker.com !
Bonsoir Superbe réalisation et originale !!!! Mes vifs compliments, bravo à l'équipe. Ma petite question concerne les sorties pour l'utilisation : Quelles sont les signaux à sortir afin de contrôler un ensemble téléguidé (voiture, quadracopter, etc) Un petit paragraphe supplémentaire permettrait de bien définir cet excellente réalisation. Encore mes sincères félicitations.
En effet l'article ne présente que la partie captage des signaux. La partie utilisation / transfert des données n'est pas mentionnée. EN regardant de plus prêt le code vous remarquerez qu'il n'y a plus beaucoup d'entrée sorties disponibles en utilisant autant de capteurs. Cependant il reste les pins 0 et 1 dédiée à l'UART et les pins A4 et A5 dédiée à l'I2C.L'idée de cette ceinture ultrasons est de former un ensemble capteur intelligent communicant soit en I2C soit en UART les différentes valeurs lues. Ce "capteur" serait alors à brancher sur le cerveau de votre robot en Uart ou en I2C ...
Bonjour, Super tuto qui donne de bonnes idées ! Pour la communication, c'est justement ce que j'essaie de mettre en ce moment, mais je rame sur le code (arduino). Serait-il possible d'avoir un exemple, un lien ou une piste à retravailler ? J'essaie actuellement via la communication série RX/TX des cartes, en envoyant une lettre correspondant à la plage de distance détectée. Avec un capteur, j'arrive à un résultat, avec 2 et 3, ça ne marche plus... Merci par avance pour l'aide éventuelle !!! Mickaël