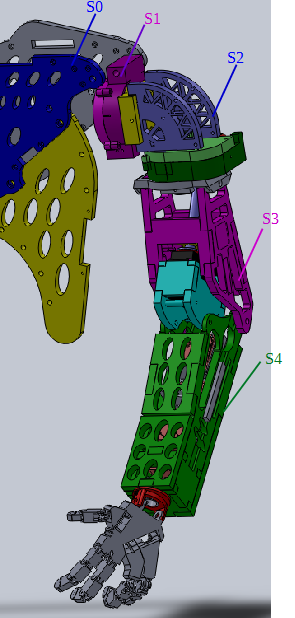
Bonjour je travaille à la mise au point de deux programmes permettant de piloter les mouvements d'un bras robotique :
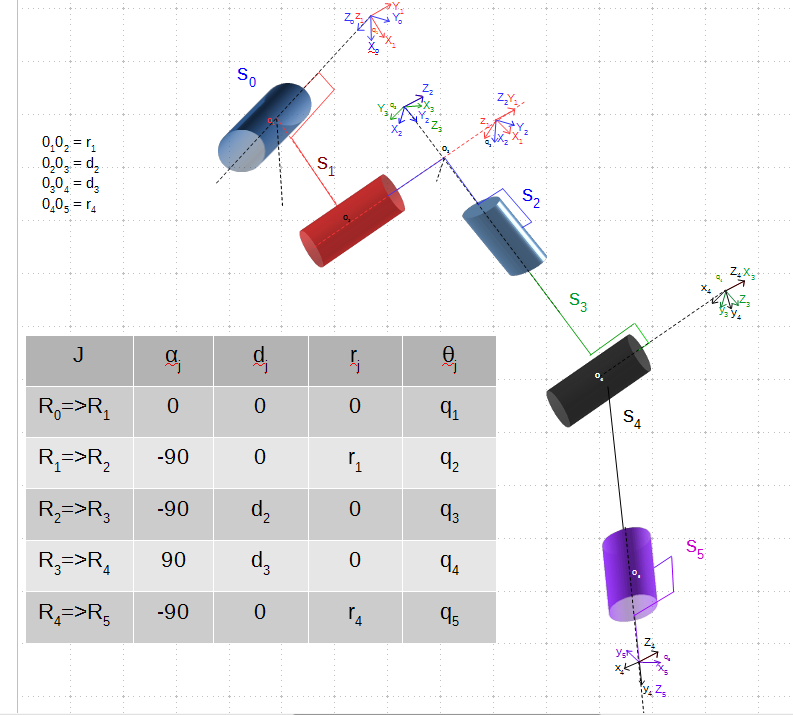
Pour ce faire je l'ai modélisé et J' ai calculer les matrices de davenit hademberg
Pour le modèle direct pas de problème mon algo sous matlab me fournit les valeurs de pose en fonction des valeurs articulaires
Mes problèmes arrivent avec la cinématique inverse et elle sont de plusieurs ordres :
premièrement le principe
on calcule le jacobien correspondant à delta X = J delta teta avec X pose et teta articulaires
puis on inverse la relation, cependant pour que cela soit possible il faut que det J ne soit pas nul ce que l'on nomme une singularité
1er problème je comprends bien ce que mathématiquement signifie la singularité mais physiquement que cela signifie t il?
comme jJ n'est pas carré J-1 n'est pas directement calculable plusieurs techniques d'inversions existent
choisir la transposé delta teta = Jt delta X
la pseudo inverse de Moore Ponrose delta teta = J* delta X avec J* =Jt(JJtI)-1
2ème problème : Pour un robot de 5 ddl en chaine ouverte quelle solution est la plus pertinente?
3ème problème :Enfin une fois ce calcul fait il lie des écarts de position a des écarts articulaire alors comment coder un programme ou l'on saisit une coordonnées de pose et le logiciel calcul les coordonnées articulaires