
Voici un nouveau test : le moteur Nema 23
Ces dimensions sont 77mm en longueur et 56mm de large. L'arbre fait 8mm de diamètre et 20mm de long.
Voici ce qu'on peut lire comme information:
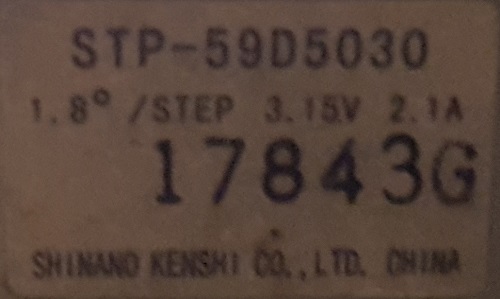
Il possède 6 fils :
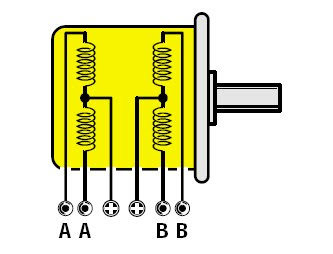
En tant que moteur bipolaire vous avez donc 2 choix de câblage, avec bobinage entier ou avec demi bobinage.
Avec un câblage bobinage entier vous avez le maximum du couple mais moins de vitesse, alors qu'avec un câblage
demi bobinage vous avez un plus grande vitesse mais moins de couple.
-Câblage bobinage entier: il faut utiliser les bornes A_A et B_B.
-Câblage demi bobinage: il faut utiliser une des bornes A avec la borne + correspondante, Idem pour B.
Je vais commencer par regarder la différence de vitesse entre les 2 câblages à 16v.
Pour ca j'utilise un driver DM432C : http://www.robot-maker.com/forum/topic/10771-driver-de-pas-a-pas-dm432c-teste-par-ashira/
et un oscillateur à base de NE555 dont je fais varier la fréquence pour faire varier la vitesse du moteur.
Le résultat en vidéo :
On voit bien qu'avec le câblage bobine entière la vitesse max est plus faible qu'avec un câblage demi bobine.
D'ailleurs dans ce cas à 16v cadonne 460Hz soit 138 tr/min pour le premier cas, puis 880Hz soit 264 tr/min pour le second cas.
Prochainement je ferai le même test en36v, on devrait voir un gain en vitesse important! 
J'aimerai aussi mesurer le couple (en rotation) par rapport à ces 2 câblages.

#1

-
- Modérateur
-

- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 04 mars 2017 - 01:41
#2
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 mars 2017 - 08:32
Il pèse combien ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#4
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 mars 2017 - 07:57
Ah, oui, quand même ! C'est super lourd !Il pèse 1094g exactement
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#5
-

- Membres
- 37 messages
Nouveau membre
Posté 19 mars 2017 - 04:50
Bon, question stupide mais faut bien débuter : comment un moteur pas à pas de ce type maintient-il sa position ? Est-ce le driver qui envoie des impulsions ? Je m'explique : dans le cas d'un bras articulé, il y a le poids de tout le bazar qui est au bout du "segment", le moteur pas à pas va être alimenté pour atteindre une position, mais comment la maintient-il ?
J'ai cru comprendre que les servo moteurs maintenaient eux même la position, mais le problème c'est qu'ils sont chers et du coup je suis obligé de me débrouiller avec des Nema ou autres.
#6
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 19 mars 2017 - 05:46
Tu augmente le couple d'un moteur avec une réduction mécanique. Cherche moteur + réducteur. Par exemple : https://fr.wikipedia...teur_mécanique
#7
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 19 mars 2017 - 06:14
Mais comme le dit Path, utiliser en plus une réduction est conseillé pour ce que tu veux faire.
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

