J'ai pour projet de modifier une voiture rc qui ne fonctionne plus pour qu'elle soit commandée en Bluetooth au moyen d'un smartphone ou d'une tablette, le tout sur une base arduino qui sera évolutive.
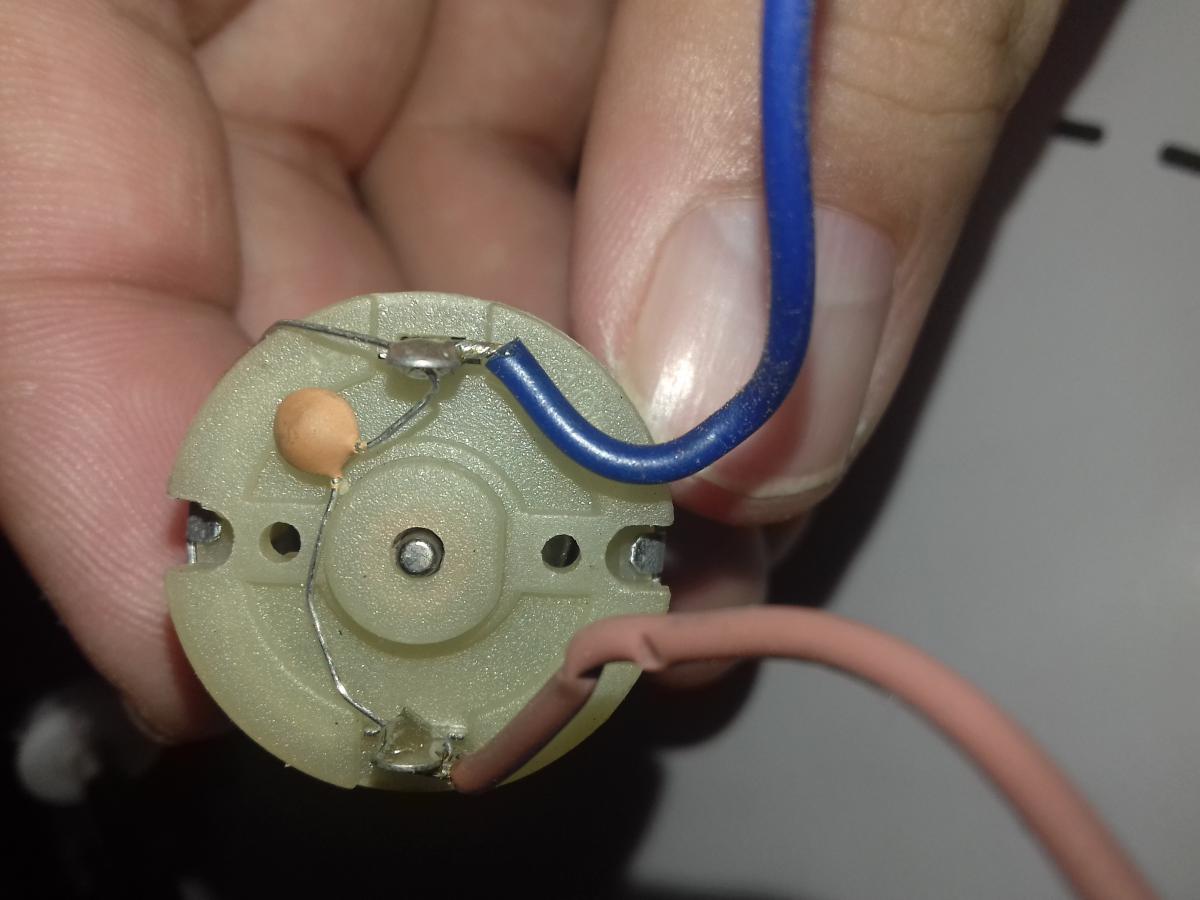
Au démontage je me suis trouvé face à un système de direction dont je joins la photo. Dois je le considérer comme un servomoteur classique.
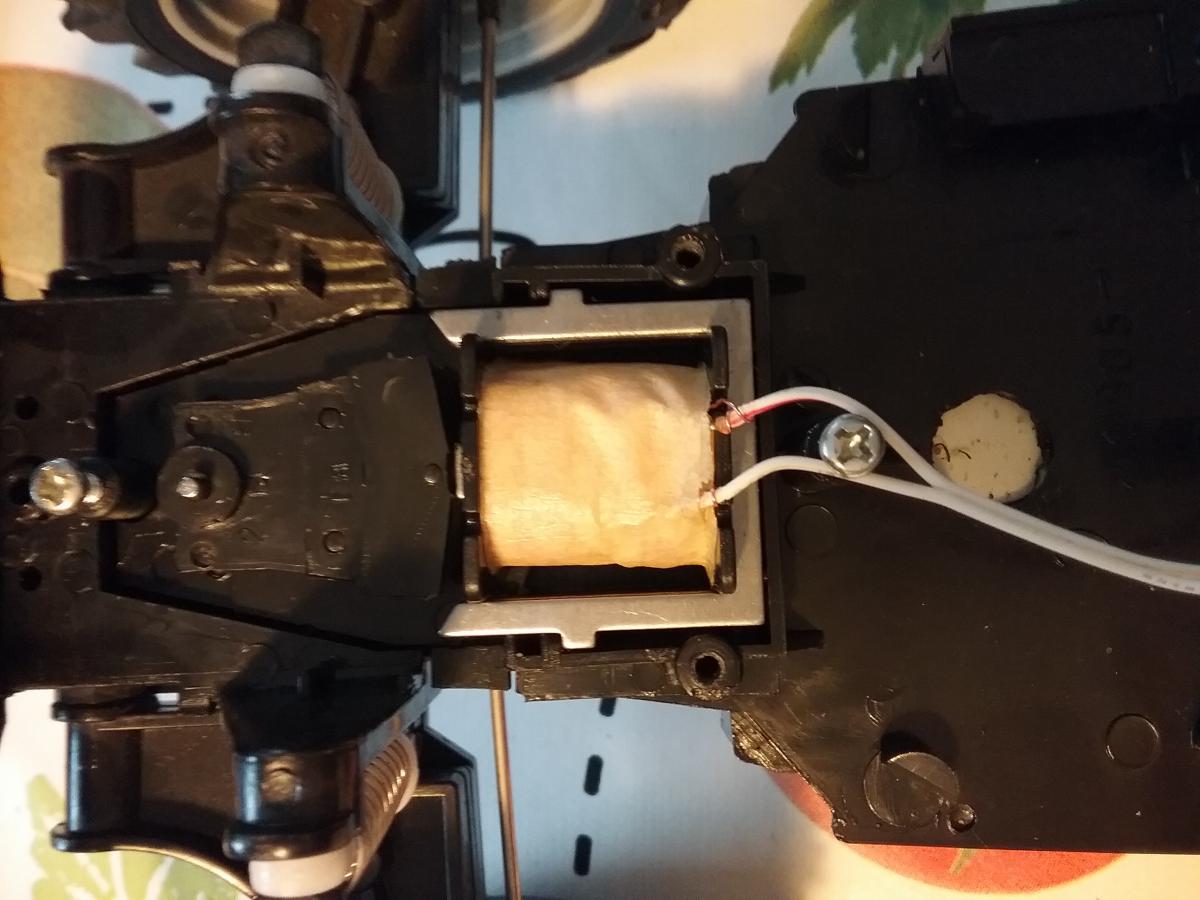
Autre question : Comment définir les caractéristiques du moteur d'origine ? En faisant des recherches sur internet je n'ai pas trouvé de fiche caractéristique de la voiture avec les spécifications concernant le moteur.
D'avance merci pour votre aide.


 essaies de mettre les photos et dis nous combien de piles alimentent la voiture et on pourra surement en déduire certaine caractéristique du moteur.
essaies de mettre les photos et dis nous combien de piles alimentent la voiture et on pourra surement en déduire certaine caractéristique du moteur.