Salut,
Aujourd’hui je vais présenter les roues mecanum.

Ces roues permettent de réaliser des mouvements dans toutes les directions et ceux sans avoir à orienter le robot dans la direction voulus comme pour des roues classiques. Grâce à cela finit les robots qui se cognent dans des coins lors d’une rotation. Et en plus moins d'alignement à faire signifie des déplacements plus rapides mais également de toutes nouvelles possibilités de trajectoires possibles.
Les roues doivent être disposées le long d’un rectangle, les consignes des moteurs sont extrêmement simples, elles sont composées de trois directions : une marche avant-arrière, un déplacement latéral et une rotation sur soit même.
Avec les directions comme suivant :
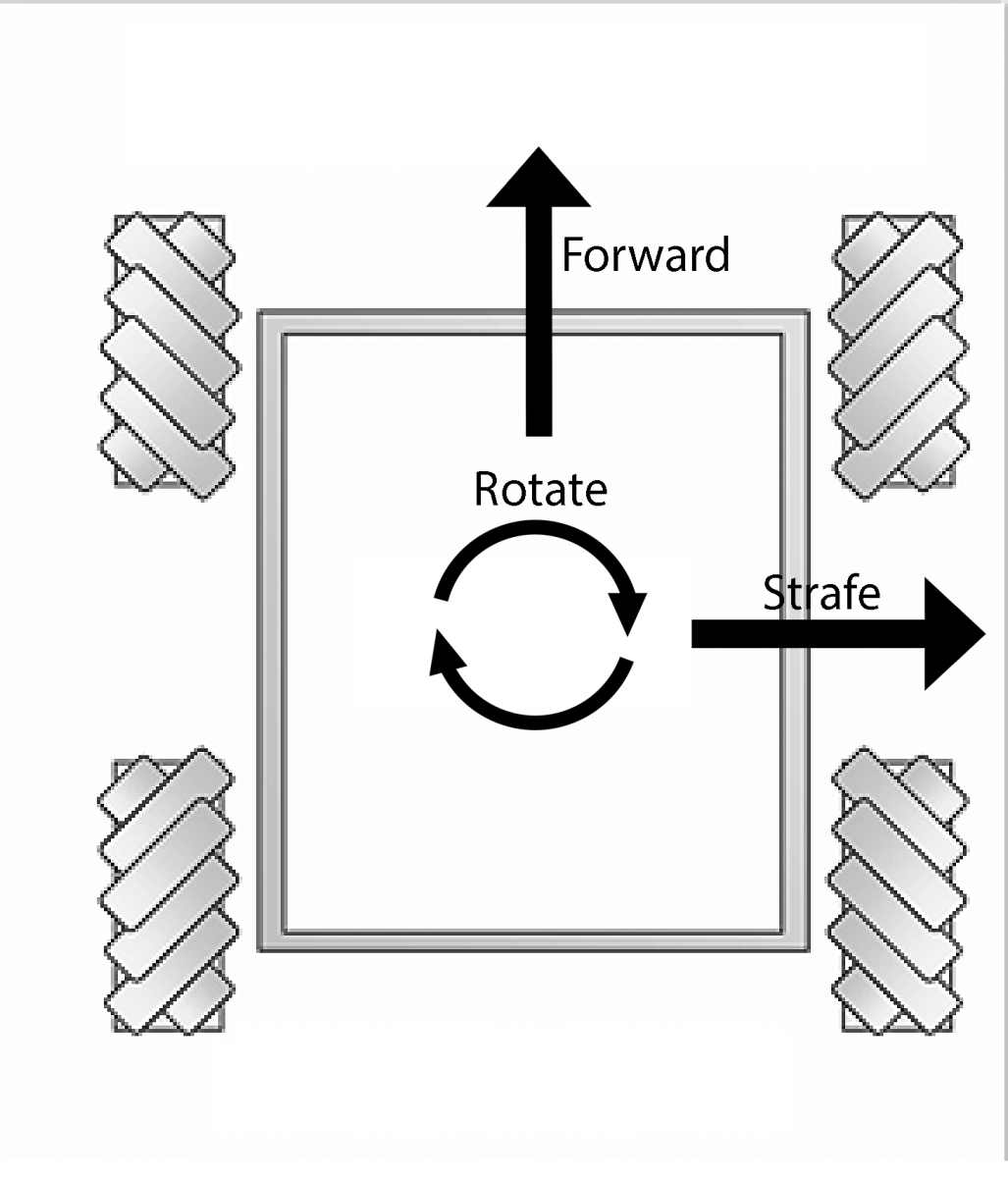
Les consignes motrices sont alors les suivantes :
front_left = forward + strafe + rotate;
rear_left = forward - strafe + rotate;
front_right = forward - strafe - rotate;
rear_right = forward + strafe - rotate;
Il faut noter que pour des mouvements verticaux ou horizontaux les quatre moteurs tourneront mais pour des diagonales parfaites seul deux moteurs tourneront, il faudra donc prévoir le couple des moteurs en conséquence.
Les rouleaux sont dans un matériau un peu caoutchouté pour avoir de l'adhérence.
Pour tester nos roues nous avons construit une base en utilisant des moteurs pas à pas sans odométrie pour le moment et nous lui avons fait quelques mouvements simples dans les 3 directions puis nous avons réalisé une trajectoire circulaire avec une orientation constantes. Pour faire bouger nos roues nous avons utilisé la librairie des L6470 sur mbed  .
.