
Hello, j'ouvre ce topic afin de vous présenter mon projet de quadrupède. J'aimerai réaliser un robot de ce type capable de se déplacer de manière autonome et interagir (à moindre mesure) avec son environnement. Je souhaite pouvoir le contrôler via la voix et faire du tracking de personnes (suivre quelqu'un).
L'architecture du robot est découpée grosso modo en deux parties :
La partie "intelligence" est gérée via une Raspberry Pi 3 sur laquelle j'ai installé Raspbian et un environnement Python. J'utilise un ReSpeaker 2-Mics Pi Hat pour l'input/output du son (commandes vocales) avec Snips.ai. J'ai une Raspberry Pi v2 caméra pour la reconnaissance visuelle (OpenCV) et un rplidar A1 pour la navigation.
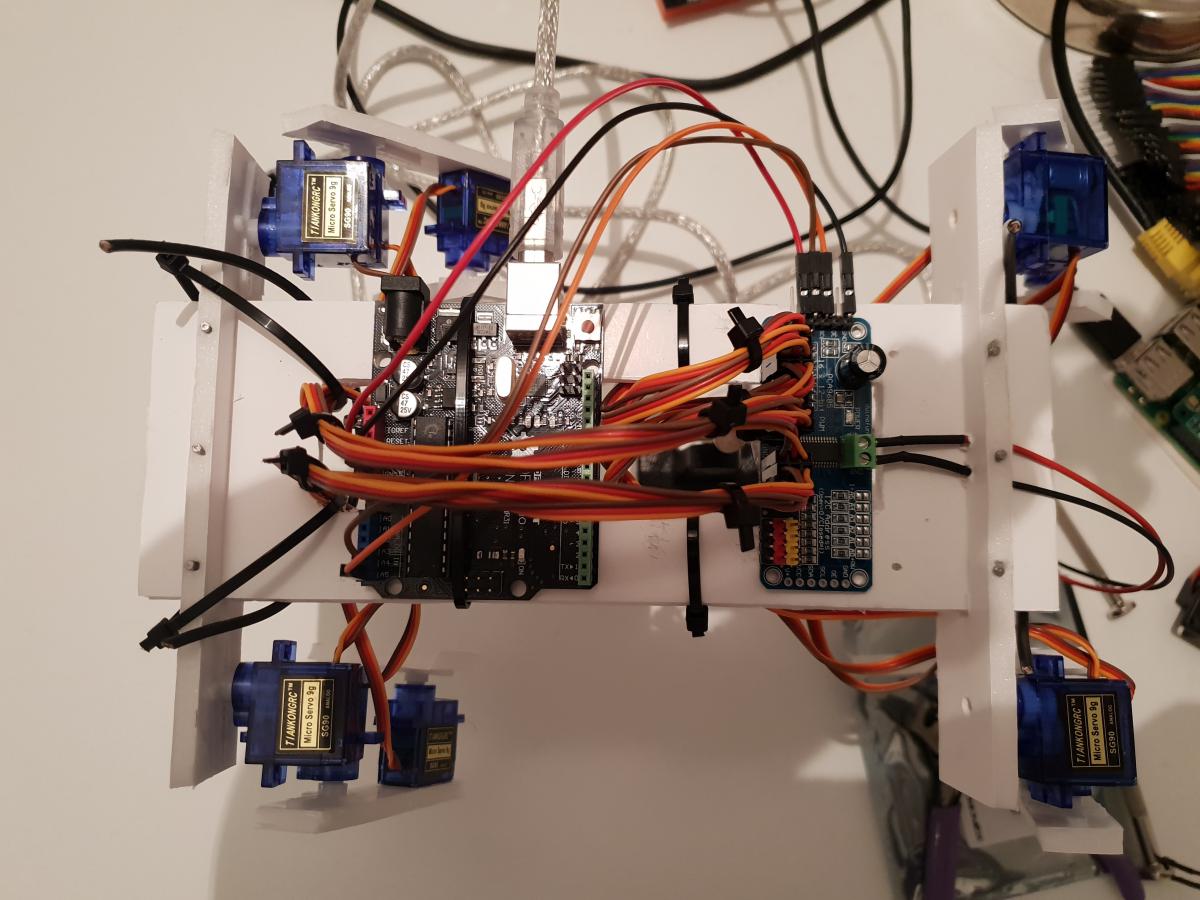
La partie mécanique est gérée via une Arduino Uno. La carte reçoit directement les commandes via la Raspberry Pi (Firmata). Une carte PCA9685 branchée à l'Arduino me permet de gérer l'ensemble des servos.
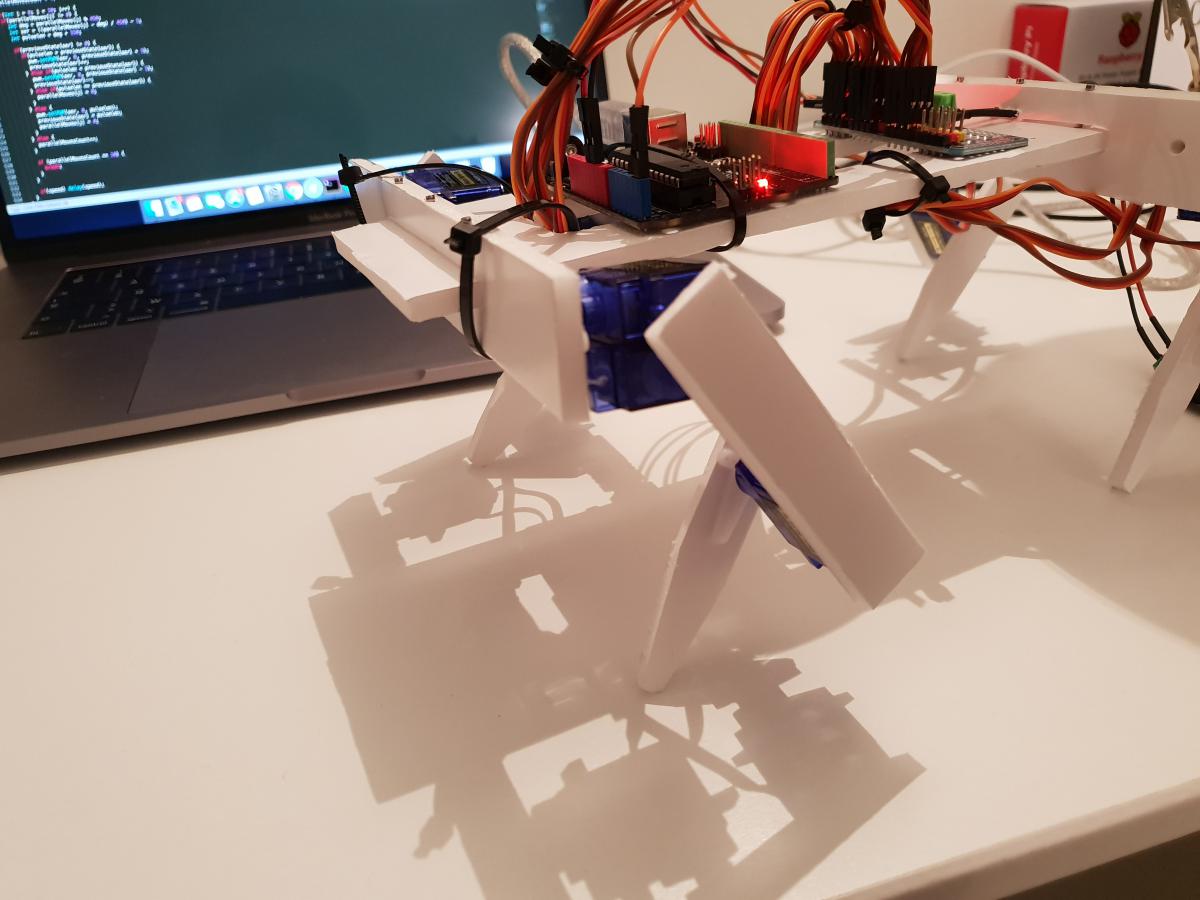
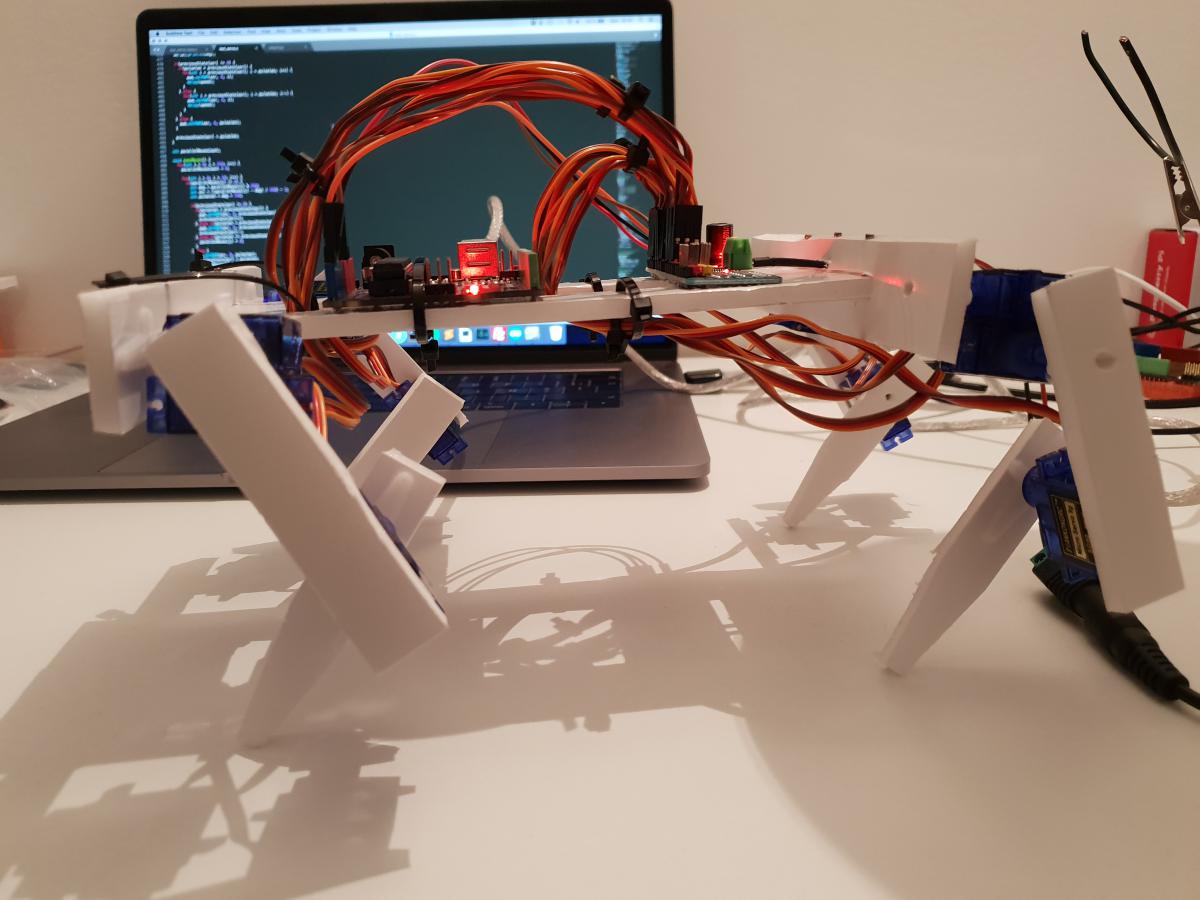
En ce moment j'étudie différentes manières de gérer la marche quadrupède. Pour cela j'ai créé une maquette de mon robot à échelle réduite avec 12 micro-servos, du carton-plume et pas mal de super-glue :
Dès que j'aurai un résultat satisfaisant je ferai une petite vidéo 












