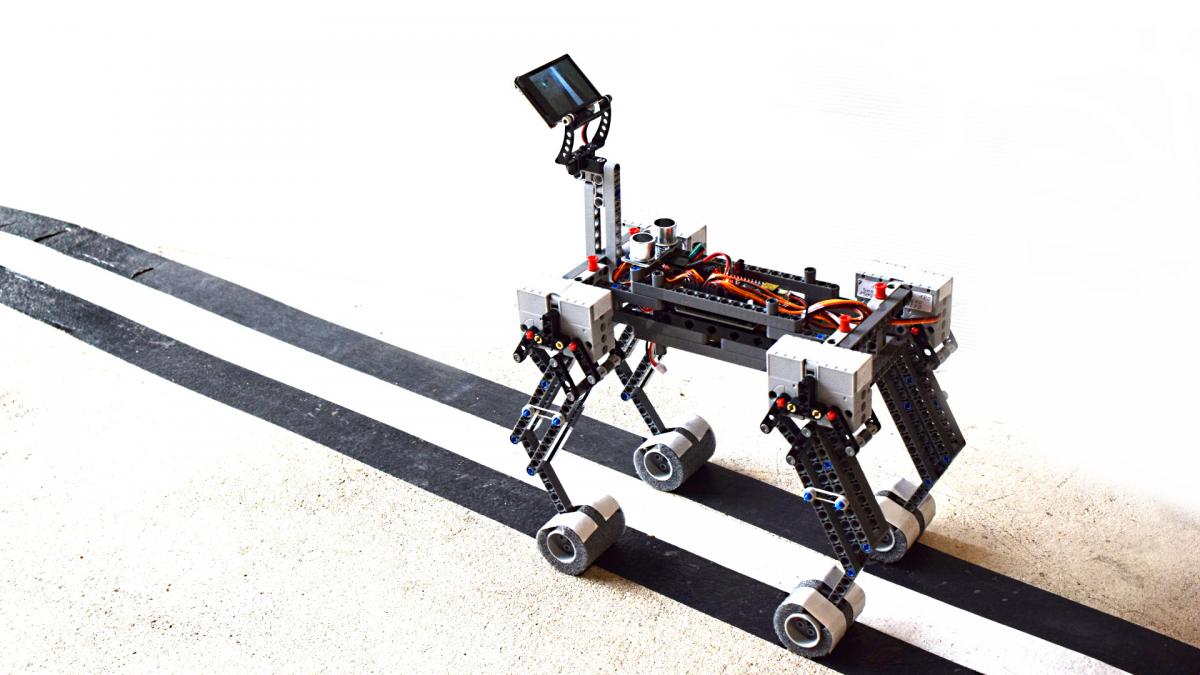
J'ai décidé de faire un quadrupède 8 DOF(Degrees Of Freedom) avec des GeekServos pour sa simplicité et ainsi me focaliser sur le problème du "Suiveur de ligne" avec un Huskylens.
Sur ma terrasse, le carrelage est en opus romains, et donc les lignes ne sont pas alignées. Cela crée une grande confusion pour l'Huskylens. De plus, la lumière extérieur est beaucoup trop importante.
Dans mon séjour, le carrelage est aligné, la lumière est bonne, mais mon épouse n'aurait pas apprécié que je colle du gros scotch au sol . . . Elle est comme ça ! Dommage. 
Restait le garage, mais à condition que je ferme les portails. Bonne pioche, cela a l'air de fonctionner.
Pas facile, le code ! J'ai eu quelques difficultés avant de me rendre compte que l'Huskylens buggait quelque peu.
Mais bon, je pense que pour un premier jet, ce n'est pas si mal.
J'espère améliorer la vitesse et la perception de la ligne. En principe, donc, d'autres tests sont à venir.