Bonsoir à tous,
Je suis actuellement en 1ère SI, et comme tout élève de 1ère de France, j'ai un TPE à réaliser, et, SI oblige, un système ou du moins un prototype à réaliser. Avec 2 amis, nous nous sommes lancés dans la réalisation de chaussures à laçage automatique (oui, comme dans retour vers le futur).
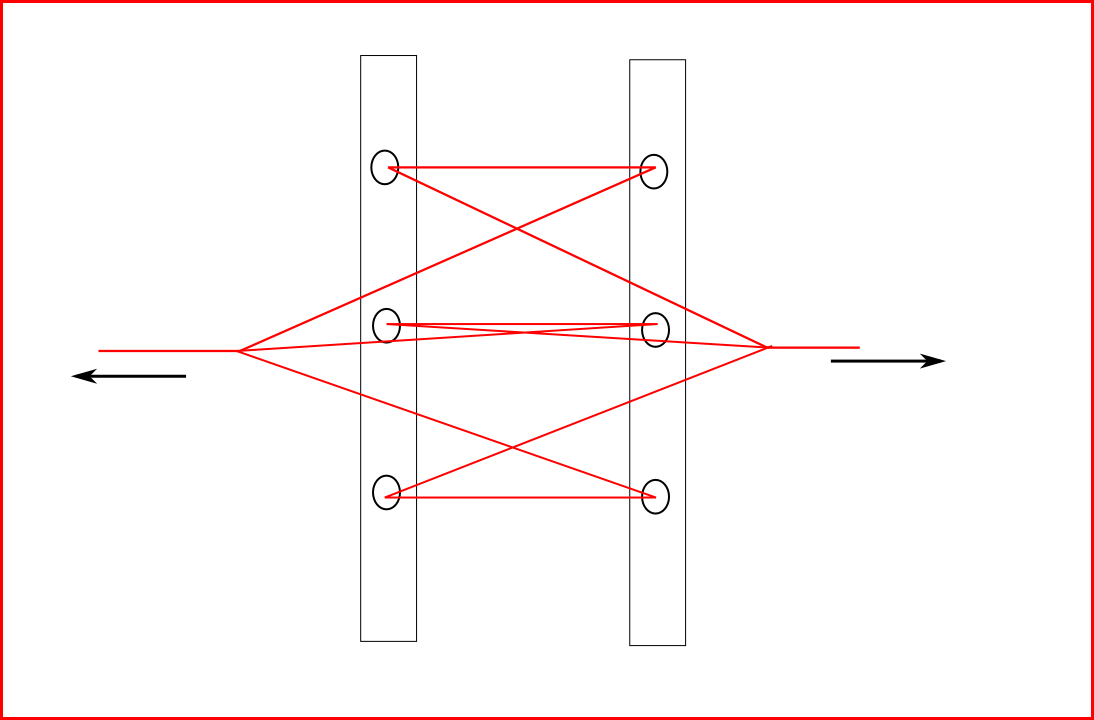
En PJ, le schéma du laçage
Au final,on se retrouve avec 2 lacets à tirer (ils viennent s'enrouler autour de l'axe d'un moteur) (et le couple nécessaire calculé est relativement faible - la plupart des moteurs des catalogues ont un couple bien supérieur)
La question qui subsiste est : Vaut-il mieux utiliser 1 moteur à courant continu (placé sous la chaussure), ou 2 servomoteurs (placés de part et d'autre de la chaussure)? Quels sont les avantages de chaque type de moteur ?
Je ne m'y connais absolument pas en robotique et je vous remercie donc de m'apporter une aide précieuse

Moteur à CC ou servo ?
Débuté par Sacha, déc. 17 2011 07:18
8 réponses à ce sujet
#2

Astondb8
-

- Membres
-

- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 17 décembre 2011 - 07:23
Pas de pièce jointe
Donc difficile a dire
Cdlt
Yves
Donc difficile a dire
Cdlt
Yves
#3
Sacha
-
- Membres
- 4 messages
Nouveau membre
Posté 17 décembre 2011 - 07:25
Pas de pièce jointe
Donc difficile a dire
Cdlt
Yves
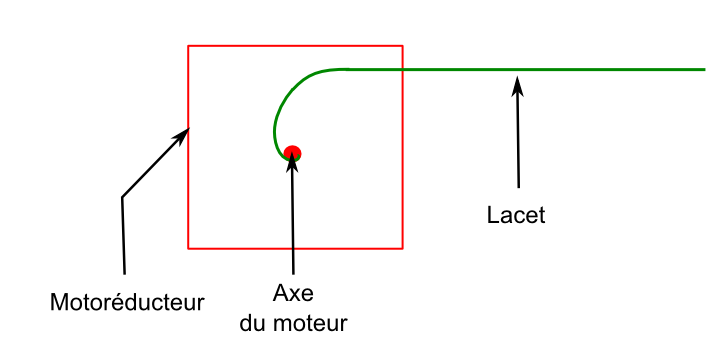
C'est bon là ? Et je me suis mal exprimé, lemoteur à CC est en fait un motoréducteur
Image(s) jointe(s)
#4
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 17 décembre 2011 - 07:32
Difficile à dire comme ça 
Nous ne connaissons pas la course de débattement, la force de serage.
Mais à priori sans en savoir plus je dirais servomoteur.
Nous ne connaissons pas la course de débattement, la force de serage.
Mais à priori sans en savoir plus je dirais servomoteur.
#5
Sacha
-
- Membres
- 4 messages
Nouveau membre
Posté 17 décembre 2011 - 07:41
Mais est-ce qu'un servo peut avoir une course de plus de 180°(voire plusieurs tours) ?
#6
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 17 décembre 2011 - 07:46
Mais est-ce qu'un servo peut avoir une course de plus de 180°(voire plusieurs tours) ?
Les Dynaximel 300°
Passer par des engrenages (grande roue cotée motreur)
Mais pas simple pour plusieurs tours non.
Mais cela repond a ce que je disais
Tu ne nous en dis pas assez pour que nous puissions te répondre.
Alors soit tu nous décris le projet et nous pourrons t'aider, soit nous risquons de te proposer des solutions qui ne vont pas et nous allons perdre beaucoup de temps.
#7
Sacha
-
- Membres
- 4 messages
Nouveau membre
Posté 17 décembre 2011 - 07:56
Les Dynaximel 300°
Passer par des engrenages (grande roue cotée motreur)
Mais pas simple pour plusieurs tours non.
Mais cela repond a ce que je disais
Tu ne nous en dis pas assez pour que nous puissions te répondre.
Alors soit tu nous décris le projet et nous pourrons t'aider, soit nous risquons de te proposer des solutions qui ne vont pas et nous allons perdre beaucoup de temps.
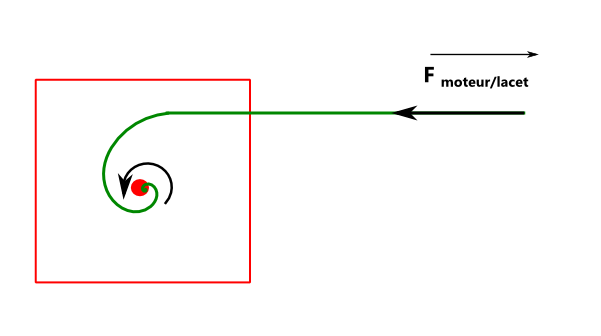
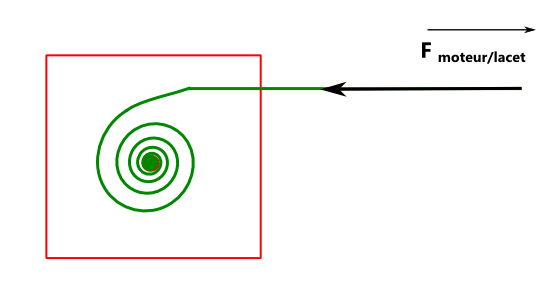
En gros, chaque lacet final du schéma envoyé précédement est relié à un moteur (son axe j'avais pensé, mais une roue, ou autre peut très bien faire l'affaire). L'axe tourne, le lacet s'enroule autour, il exerce un certain couple (si c'est autour de l'axe C = 0,02 N.m), ce qui donne au final une force d'environ 10N. Néanmoins, pour que la chaussure soit enfilable, il faut que le lacet soit lâche (cad 10 cm environ de "marge") il y a donc 10 cm de lacet à enrouler autour de l'axe du moteur. Donc plusieurs tours.
l'action est à faire de chaque côté : d'où 2 servomoteurs. Mais est-ce adapté ?
Image(s) jointe(s)
#8
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 17 décembre 2011 - 08:56
En gros, chaque lacet final du schéma envoyé précédement est relié à un moteur (son axe j'avais pensé, mais une roue, ou autre peut très bien faire l'affaire). L'axe tourne, le lacet s'enroule autour, il exerce un certain couple (si c'est autour de l'axe C = 0,02 N.m), ce qui donne au final une force d'environ 10N. Néanmoins, pour que la chaussure soit enfilable, il faut que le lacet soit lâche (cad 10 cm environ de "marge") il y a donc 10 cm de lacet à enrouler autour de l'axe du moteur. Donc plusieurs tours.
l'action est à faire de chaque côté : d'où 2 servomoteurs. Mais est-ce adapté ?
Alors pas forcement
Ilm suffit que tu prennes un servo de 180° avec un cabestan de 5Cm et tu a un mouve,ment tirant de 10Cm
Bien plus simple a gérer qu'un enroulement autour d'un axe
#9
gregfr59
-

- Membres
- 2 messages
Nouveau membre
Posté 27 décembre 2011 - 03:02
un servo modifié en motoreducteur est aussi intéréssant je pense.
la manip est assez simple a realiser en enlevant la butée du pignon terminal(la ou se fixe le palonier) et en sortant le potentiometre de facon a pouvoir trouver le point neutre qui de ce fait,permetra a ton servo de tourner a l'infini d'un sens et de l'autre tout en gardant une action proportionnelle.de plus un servo consomme moin qu'un moteur je pense.
la manip est assez simple a realiser en enlevant la butée du pignon terminal(la ou se fixe le palonier) et en sortant le potentiometre de facon a pouvoir trouver le point neutre qui de ce fait,permetra a ton servo de tourner a l'infini d'un sens et de l'autre tout en gardant une action proportionnelle.de plus un servo consomme moin qu'un moteur je pense.








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

