Après avoir fini mon projet de PPE, il ne me tarde qu'une seule chose : refaire un autre projet (c'est vrai qu'on y prend goût à ces choses la)
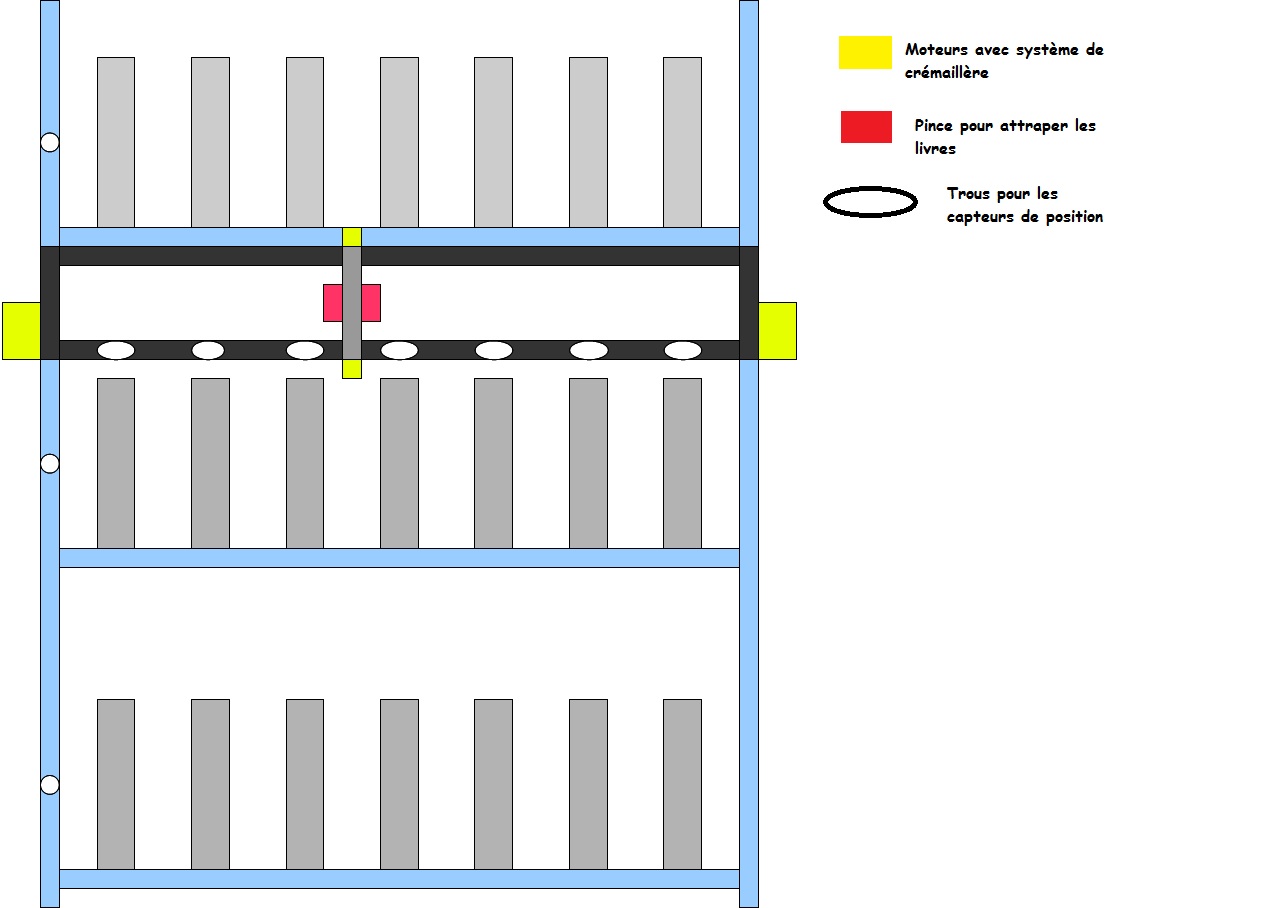
Voici donc mon nouveau projet : nommé handibot, qui serait en fait un robot, ou plus exactement un bras pour attraper les livres dans les bibliothèques (très utile pour un handicapé en fauteuil roulant par exemple) .. L'utilisateur entrerait le nom du livre via un clavier USB, relié à une arduino, et en fonction du livre, faire déplacer de tant en x et tant en y, puis attraper, mais j'ai un souci : le programme : je vois à peu près comment tout faire, mais un endroit ou je bloque : comment fait t'on pour que le programme enregistre toutes les touches, qu'il les regroupe en une variable des que l'on appuie sur "entrez" ?
Donnez moi votre avis sur le projet et si quelqu'un a une idée sur cette partie de programme, je suis tout ouïe !!
Merci d'avance