

Je précise juste que ce projet n’est pas dans le cadre scolaire.
L’objectif est de faire une voiture « autonome », enfin juste qu’elle ne se prenne pas les murs !!
La différence avec le même type de projet qu’on trouve sur le net c’est la direction, en effet les roues tournent réellement contrairement aux projets ou l’on fait tourner un coté du robot pour tourner (pas facile à expliquer !)
Le matériel :
- Une arduino Uno
- Un capteur ultrason
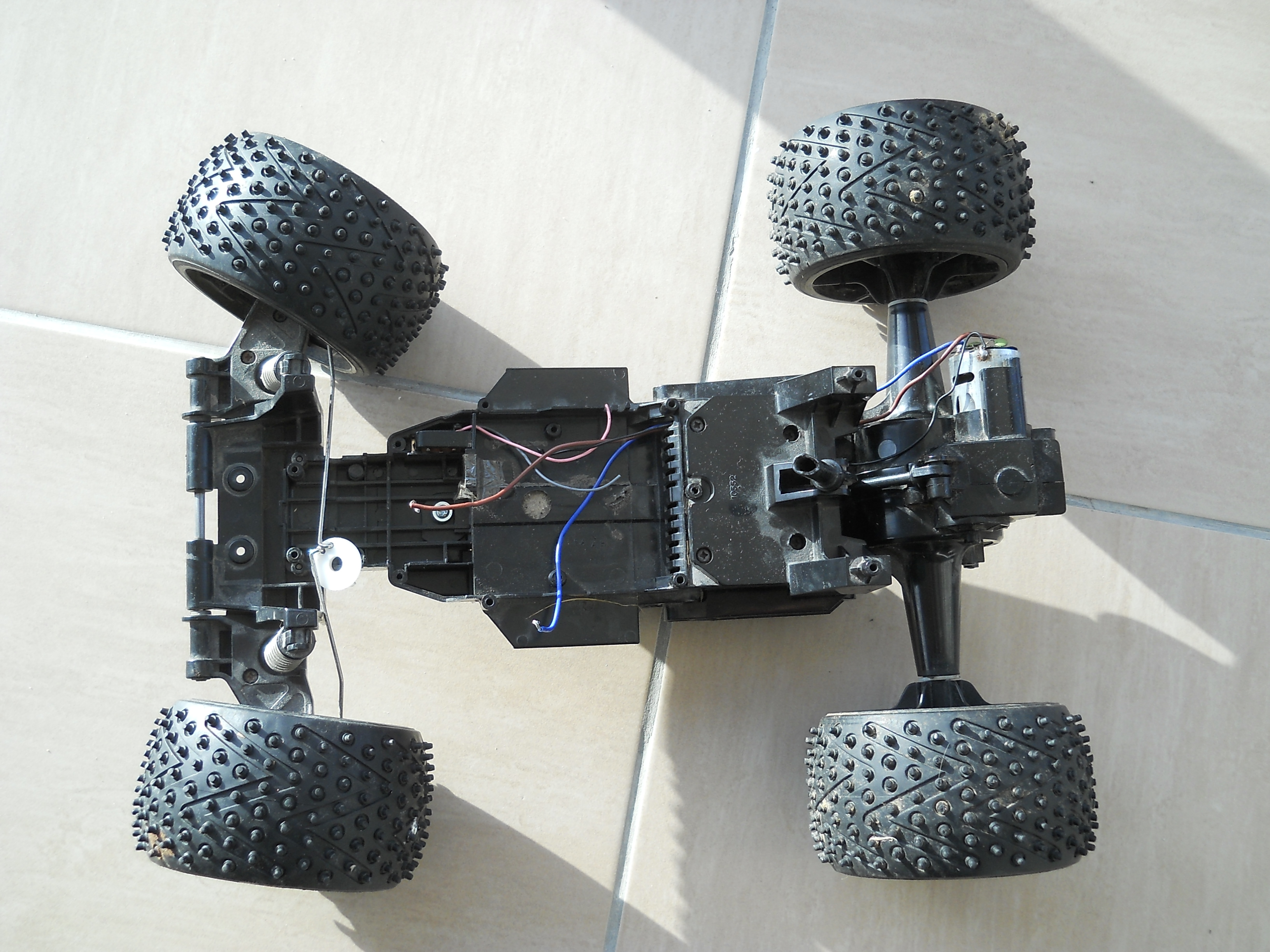
- Un châssis de voiture télécommandé
- Une carte de gestion moteur L298N

Donc pour le moment il faut que lorsque la voiture arrive à 60cm du mur elle tourne (La voiture est prévue pour tourner en extérieur)
Tout d’abord il me faut changer le servo moteur de la direction, en effet il est assez spécial, il comporte 6 fils :
Noir : alimentation moteur
Bleu : antiparasitage
Blanc : milieu du potentiomètre
Vert : Borne potentiomètre
Jaune : Borne potentiomètre
J’ai donc commandé un servomoteur classique à 3 fils
Concernant les évolutions possibles, je pense surtout à une commande IR avant de prendre un dispositif de plus longue portée ou encore un servo supplémentaire pour pouvoir adapté le capteur dessus ainsi le robot fera un choix en fonction de la place qu’il y a sur les cotés
Pour le moment j’attends le matériel que j’ai commandé !
& bien sur vous pouvez donner votre avis !!
Bonne journée


















