
 Mon contenu
Mon contenu Non spécifié
Non spécifié





Hello tous!
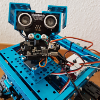
Voici CubDog à prononcer [kyoob dog]
Cube car il est carré et dog car il est cencé nous suivre partout comme un toutou.. J'hésite aussi avec follower-cube pour le cube-suiveur, bref on s'en fous un peu :-D

J'ai enfin fini la partie mécanique, je vais me pencher maintenant sur la partie script, rédigé en Python.

Il est muni d'une webcam (sous ses anciens yeux ultrason qui ne sont plus utilisés..), d'un Raspberry Pi ainsi qu'un écran de contrôle. Il a aussi 2 petits bras, qui se replient dans son ventre à la façon de Wall-E :-) Le chassi est réalisé avec des pièces Makeblock.
Mon but à terme sera de repérer mon regard à l'aide de la cam, récupérer la moyenne de couleur contenu dans un rectangle sous ma tête (donc la couleur de mon t-shirt) puis de la suivre, le tout à l'aide d'OpenCV.
J'ai posté une petite vidéo, je la mettrai à jour au fils des avancées 
Bonnes bidouilles à tous!


