Retour en S8 la salle des énergies. JEKERT est entièrement assemblée, l’intégralité des systèmes a été vérifiée. Tout fonctionne, les expériences scientifiques sont fiables. Les moteurs ont prouvé leur endurance. Le robot est confortablement installé sur le berceau qui sous peu sera intégré tout en haut d’un lanceur Ariane. Il reste encore à vérifier une dernière fois les énergies ainsi que les télémesures et les transmissions pour le pilotage depuis les stations de poursuite réparties tout le tour de la Terre. Les techniciens s’activent, alors que le robot bardé de systèmes techniques se repose sagement les jambes rétractées dans la configuration de lancement. La machine est en sommeil.
Le cordon ombilical.
Version autonome avec Raquette de commande, ou version simplifiée pilotée directement par le moniteur de l’IDE via la ligne série USB, dans les deux cas vu de la sonde il y a deux lignes indépendantes. La première utilisant deux fils conducteurs de section idoine apporte le +5Vcc qui alimente en énergie les servomoteurs. Le branchement se fait sur le dessus de la machine à coté du multiplexeur. Si vous optez pour la version de base, la sonde étant pilotée par le P.C, la deuxième ligne est constituée d’un simple cordon USB qui se branche sur la carte Arduino NANO et qui alimente cette dernière. Il réalise le dialogue avec le P.C. si on fait appel au moniteur de l’IDE ou il permet de reprogrammer l’ATmega328. Les protocoles sont listés sur la Fiche n°12 pour l’exploitation générale de l’explorateur, et dans la Fiche n°26 relative aux expériences embarquées. Si vous optez pour la version « étendue » avec pilotage autonome, la ligne USB ne sera pas branchée. (Sauf pour reprogrammer naturellement.) Un deuxième cordon ombilical qui comporte deux fils assez petits pour le +5Vcc et GND du calculateur de bord, (De section suffisante pour conduire 100mA.) et deux fils de faible section pour les deux lignes de dialogue série TX et RX allant au microcontrôleur gérant la raquette. Si ce projet arrive à
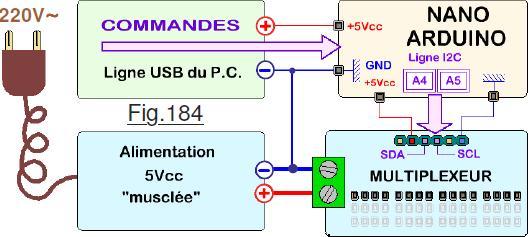
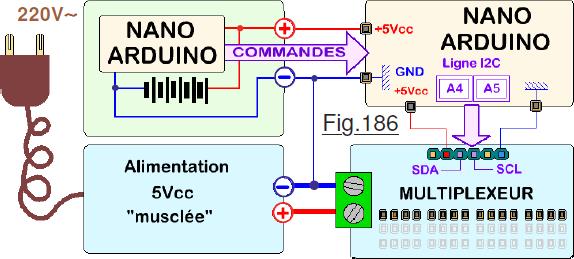
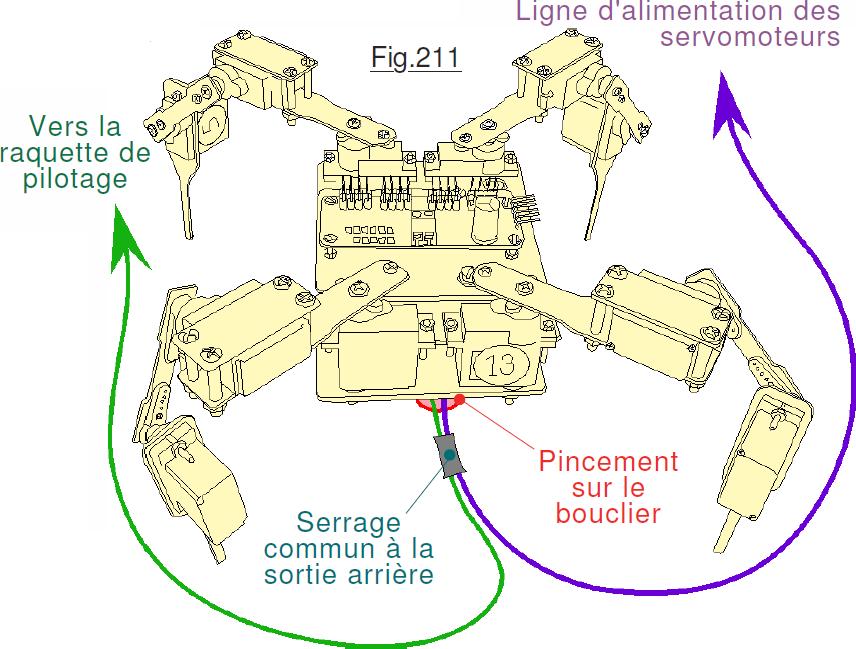 terme, c’est l’accumulateur contenu dans la raquette qui alimentera les deux cartes Arduino. Nous allons dans ce chapitre détailler la version la plus complète, sachant que vous ne serez pas obligés d’assembler les deux cordons. Si vous choisissez la version simplifiée, seul le cordon de puissance sera intégré sur la petite machine. Sur la photographie de l’Image 53.JPG on distingue parfaitement le cordon USB branché entre les deux moteurs arrière qui permet de reprogrammer JEKERT. On comprend aussi pourquoi, bien que les fils du cordon ombilical ne soient pas nombreux, il y a urgence à les rassembler en une ligne compacte. Un petit retour sur la Fig.184 et sur la Fig.186 permet de nous remémorer le fait que pour le prototype, l’alimentation en puissance sera celle branchée sur le secteur et décrite dans le TOME 1. Ayant servi à développer le projet elle a fait ses preuves. Il suffit de la relier par une ligne suffisamment longue pour laisser à la sonde une liberté suffisante. Toutefois, d’expérimentale la ligne devient un câble d’exploitation. La nuance réside dans le fait qu’en usage on sera logiquement amené à la brancher ou la débrancher relativement souvent. Le risque de connecter à l’envers augmente, car en « démonstration ludique » on perd l’étiquette d’électronicien, on oublie les contraintes et la rigueur. Je n’ai pas fais le test d’une inversion de tension, mais je présume que le risque de détruire du matériel est important. Aussi, pour parer définitivement un tel incident, il suffit d’insérer un diode en série dans le +Alimentation par exemple. Prendre un composant qui peut « tenir » 5A nominal bien que le courant moyen restera très sobre. La diode génère une chute de tension quand elle est conductrice. Il faudra par conséquent ajuster le bloc alimentation pour obtenir 5Vcc sur le multiplexeur en aval de la diode et en bout de ligne où les pertes sont maximales. La ligne est coincée entre le bouclier et le circuit imprimé principal. Sur la Fig.211 on notera qu’elle sort à l’arrière. Proche de la sonde une gaine thermorétractable relie les deux faisceaux, mais immédiatement ils se séparent pour des raisons de commodité. À l’usage, l’alimentation secteur pourra en effet se trouver en une position différente de la raquette de commande; Les deux lignes sont donc indépendantes. Si vous regardez attentivement l’Image 54.JPG qui présente le cordon ombilical version « sonde autonome », vous distinguerez la ligne filaire un peu grosse de deux fils qui alimente les servomoteurs. (Ce sont les fils un peu gros noir et violet torsadés ensemble.) Indépendant, le cordon ombilical constitué de deux fils torsadés noir et violet qui alimentent la carte Arduino et de la minuscule ligne à deux fils gris collée en paire qui véhiculent les signaux TX et RX de dialogue avec l’hypothétique pupitre de commande.
terme, c’est l’accumulateur contenu dans la raquette qui alimentera les deux cartes Arduino. Nous allons dans ce chapitre détailler la version la plus complète, sachant que vous ne serez pas obligés d’assembler les deux cordons. Si vous choisissez la version simplifiée, seul le cordon de puissance sera intégré sur la petite machine. Sur la photographie de l’Image 53.JPG on distingue parfaitement le cordon USB branché entre les deux moteurs arrière qui permet de reprogrammer JEKERT. On comprend aussi pourquoi, bien que les fils du cordon ombilical ne soient pas nombreux, il y a urgence à les rassembler en une ligne compacte. Un petit retour sur la Fig.184 et sur la Fig.186 permet de nous remémorer le fait que pour le prototype, l’alimentation en puissance sera celle branchée sur le secteur et décrite dans le TOME 1. Ayant servi à développer le projet elle a fait ses preuves. Il suffit de la relier par une ligne suffisamment longue pour laisser à la sonde une liberté suffisante. Toutefois, d’expérimentale la ligne devient un câble d’exploitation. La nuance réside dans le fait qu’en usage on sera logiquement amené à la brancher ou la débrancher relativement souvent. Le risque de connecter à l’envers augmente, car en « démonstration ludique » on perd l’étiquette d’électronicien, on oublie les contraintes et la rigueur. Je n’ai pas fais le test d’une inversion de tension, mais je présume que le risque de détruire du matériel est important. Aussi, pour parer définitivement un tel incident, il suffit d’insérer un diode en série dans le +Alimentation par exemple. Prendre un composant qui peut « tenir » 5A nominal bien que le courant moyen restera très sobre. La diode génère une chute de tension quand elle est conductrice. Il faudra par conséquent ajuster le bloc alimentation pour obtenir 5Vcc sur le multiplexeur en aval de la diode et en bout de ligne où les pertes sont maximales. La ligne est coincée entre le bouclier et le circuit imprimé principal. Sur la Fig.211 on notera qu’elle sort à l’arrière. Proche de la sonde une gaine thermorétractable relie les deux faisceaux, mais immédiatement ils se séparent pour des raisons de commodité. À l’usage, l’alimentation secteur pourra en effet se trouver en une position différente de la raquette de commande; Les deux lignes sont donc indépendantes. Si vous regardez attentivement l’Image 54.JPG qui présente le cordon ombilical version « sonde autonome », vous distinguerez la ligne filaire un peu grosse de deux fils qui alimente les servomoteurs. (Ce sont les fils un peu gros noir et violet torsadés ensemble.) Indépendant, le cordon ombilical constitué de deux fils torsadés noir et violet qui alimentent la carte Arduino et de la minuscule ligne à deux fils gris collée en paire qui véhiculent les signaux TX et RX de dialogue avec l’hypothétique pupitre de commande.
L’expérience montre que torsader plusieurs fils n’est pas une solution suffisante pour réaliser une ligne qui au cours du temps reste compacte, surtout si pour la ranger on la love en boucle comme sur la Fig.212 montrant le prototype. Aussi, tout le long des deux lignes on resserre les divers conducteurs par des petites bagues régulièrement espacées constituées de gaine thermorétractable. Ces éléments de liaison sont de couleur noire sur la photographie. Sur Image 54.JPG la douille rouge de la fiche banane du +5Vcc a été enlevée car nous somme sur le démonstrateur en cours d’élaboration. Pour pouvoir la revisser sur la fiche il faut la raccourcir, ce qui n’était pas encore fait.
{kind=link}
{kind=link}
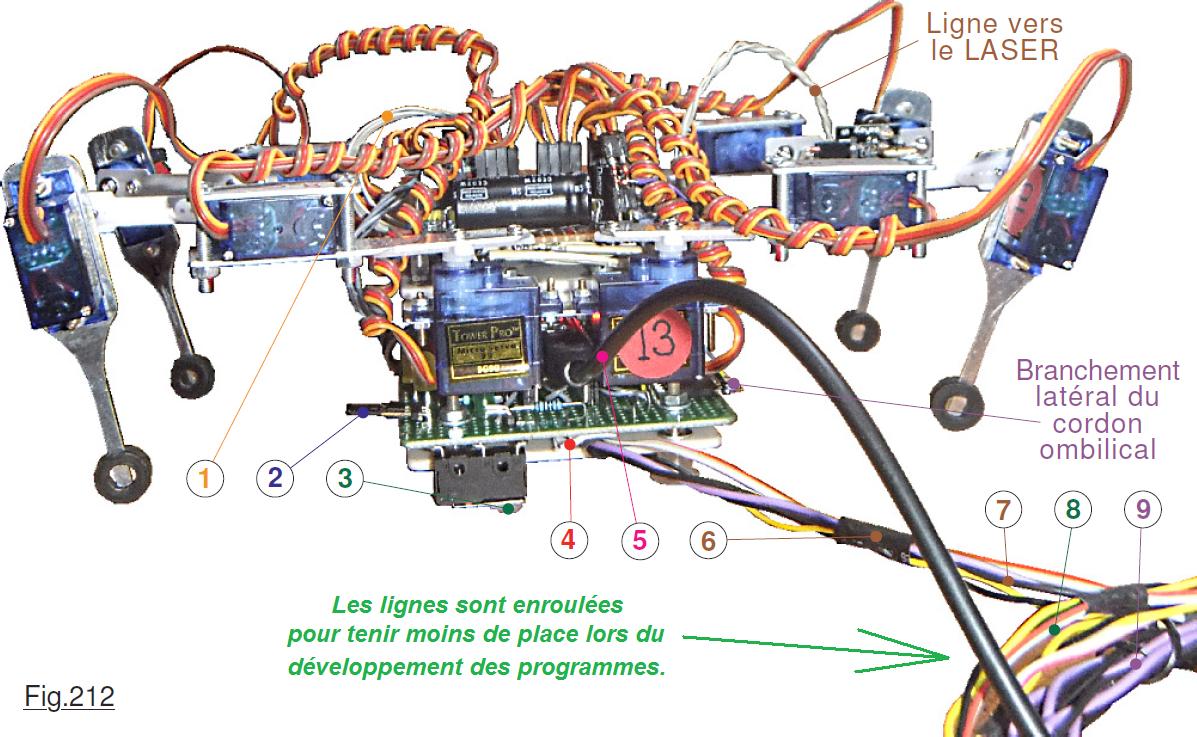
Considérons la Fig.212 sur laquelle le filtre coloré n’est pas encore réalisé. On voit en 1 la ligne qui va à la centrale gyroscopique et en 2 la languette qui permet d’éteindre la LED verte clignotante. (LED qui témoigne de l’activité de la boucle de base dans le programme résident.) En 3 se trouve le micro-contacteur qui détecte « la présence du sol ». En 5 la ligne USB va au P.C. pour une éventuelle reprogrammation, ou pour le pilotage dans la version simplifiée avec le moniteur de l’IDE. En 4 on peut observer le morceau de carton (Carton ou matière synthétique souple.) qui bloque la ligne électrique à la sortie vers l’arrière du bouclier. En 6 se trouve, bien visible, le morceau de gaine thermorétractable qui serre les deux lignes avant qu’elles ne se séparent en 7, chacune partant dans la direction imposée par l’utilisation de la sonde et la proximité d’une prise secteur pour brancher l’alimentation des servomoteurs. Enfin en 8 on repère le cordon ombilical de dialogue avec le pupitre de commande hypothétique, et en 9 la ligne de puissance. En 8 et 9 les deux lignes sont lovées en boucle et maintenues ensemble par un petit fil rigide noir pour ne pas trop encombrer le bureau de l’ordinateur au cours du développement. Il n’est pas difficile de se rendre compte sur Image 54.JPG à quel point l’entropie peut dégénérer si les deux longues lignes ne sont pas correctement enroulées quand on procède aux essais et que le bureau est encombré d’appareils de mesures et de divers plaques à essais occupées par des électroniques ébouriffées …
La suite est ici.