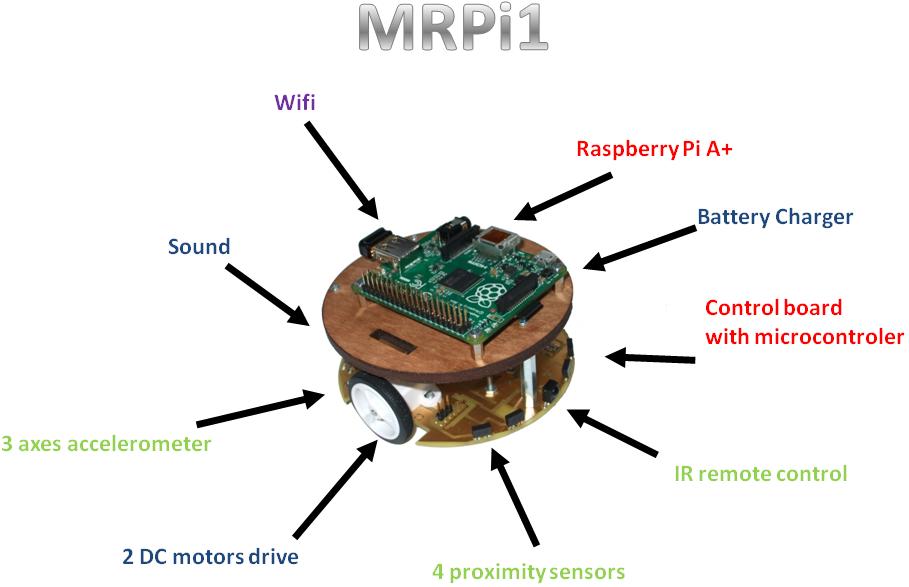
Petite précision, la raspberry pi n’est pas encore branchée à la carte du bas. L’alimentation boost pour l’alimenter va être sur la prochaine version de la carte.
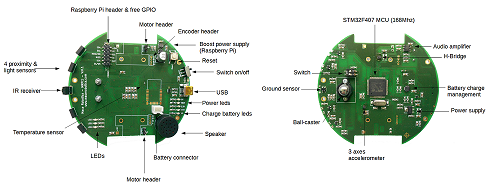
PCB châssis :
· Connecteur USB pour la programmation du microcontrolleur et pour le rechargement de la batterie.
· Microcontrôleur STM32F407
· Pond en H
· 2 motoréducteur pololu
· Une batterie 3.7 Volt
· Gestion de la recharge de la batterie
· 4 capteurs infrarouges de proximité
· 1 capteur infrarouge 38Khz (TV remote)
· 1 haut parleur
· 1 capteur de sol
· 1 accéléromètre 3 axe relié en I2C
· Alim boost pour la raspberry pi
Gestion haut niveau :
· Raspberry pi A+ : relié avec la liaison série à la carte du bas.
Logiciels utilisée :
· Kicad,
· CooCox IDE pour le firmware du microcontrôleur,
· Inkscape pour le design du support de la raspberry (découpe laser dans un fab lab)
Le connecteur du bas (non branché sur la photo précédente) permet de relier la liaison série (RX et TX) plus l’alimentation +5V pour la raspberry.
La prochaine étape est donc d’insérer l’alimentation boost sur le PCB de la carte châssis et d’améliorer la mécanique.