Bonjour @ tous !!!
J’espère que vous allez tous profiter de votre long weekend en perspective !!!
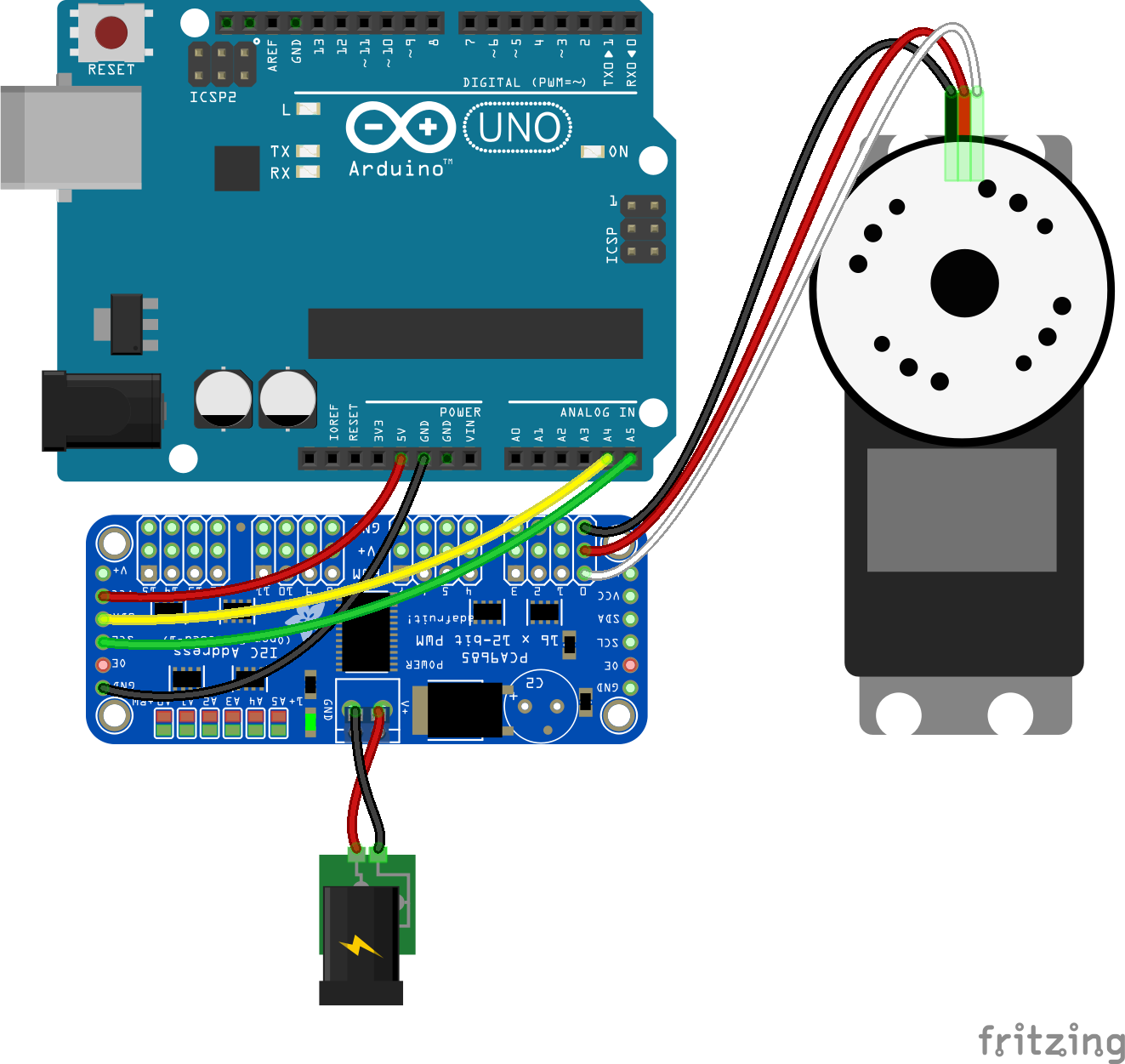
Alors ca a l'air d"aller un peu mieux avec ma carte ! j'ai effectivement brancher directement l'alimentation en direct sur un port d'un servo dispo !!
j'ai fait ce petit bout de code qui fonctionne plutôt bien !
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
#define SERVOMIN 150 // this is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 590 // this is the 'maximum' pulse length count (out of 4096)
const int DePin = 3;
void parkarm (){
}
void armpos (int pulse0, int pulse1, int pulse2, int pulse3, int pulse4, int pulse5){
pwm.setPWM(5, 0, pulse5);
pwm.setPWM(4, 0, pulse4);
pwm.setPWM(3, 0, pulse3);
pwm.setPWM(2, 0, pulse2);
pwm.setPWM(1, 0, pulse1);
pwm.setPWM(0, 0, pulse0);
}
void setup() {
pinMode(DePin, OUTPUT);
digitalWrite(DePin, LOW);
Serial.begin(9600);
Serial.println("K ARM ROBOT");
pwm.begin();
delay(1000);
pwm.setPWMFreq(60);
yield();
}
void loop() {
armpos(365,337,0,406,353,309);
delay(5000);
armpos(362,427,0,504,353,309);
delay(5000);
}
Petite question comment je pourrais faire pour avoir un mouvement progressif dans ma fonction sur chaque servo ...
car la c est un peu sec !!!
cordialement,
bypbop






 ( C'est pas pour rien que j'ai choisis ce produit pour la boutique
( C'est pas pour rien que j'ai choisis ce produit pour la boutique  )
)  Il ressemble beaucoup à celui
Il ressemble beaucoup à celui 










