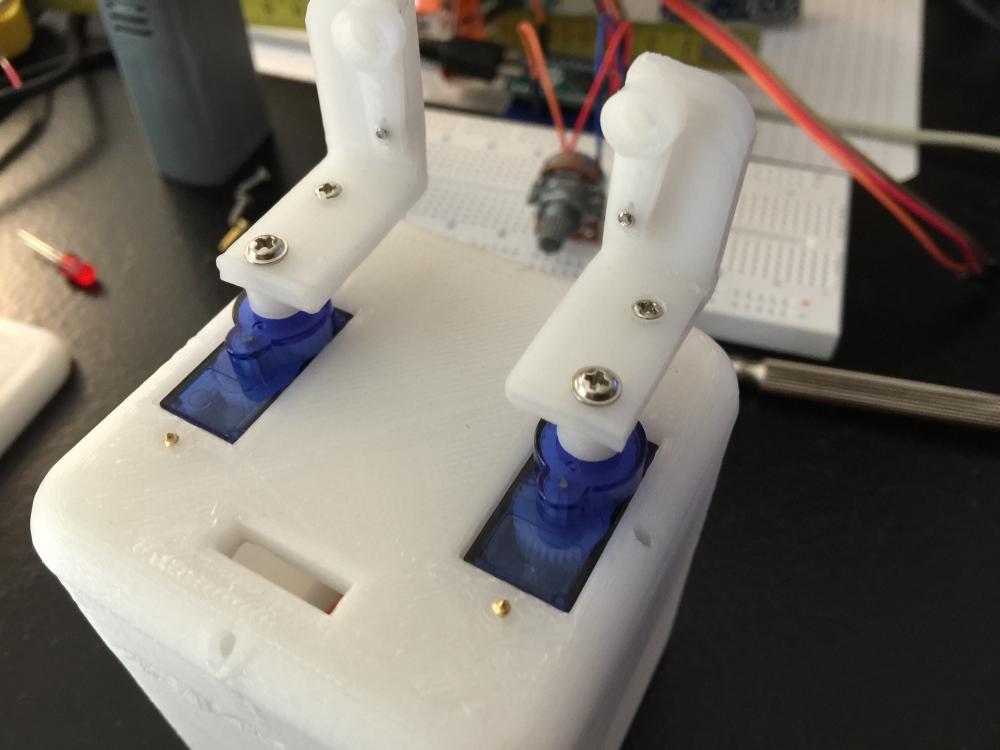
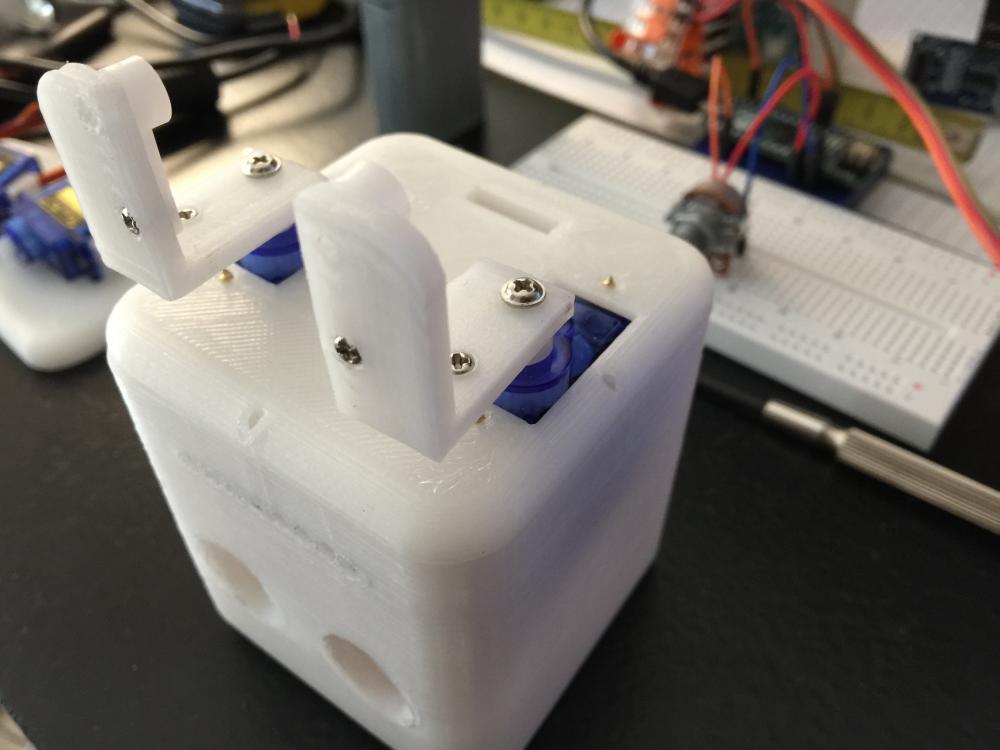
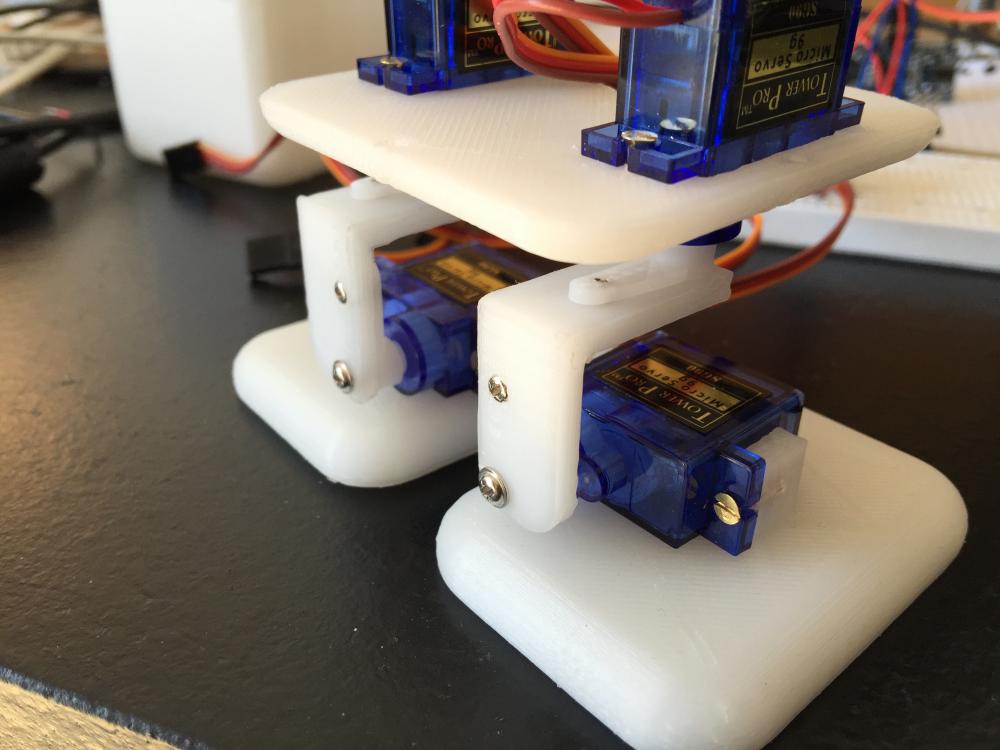
@JEF, @Guigz, Je me suis aussi lancé dans un petit Bob.
- 4 servo
- un arduino micro
- un capteur ultra-son sr04 (J'ai dépouillé celui de Ash)
J'imprime ce Bob : http://www.thingiverse.com/thing:43708

Et je commence à vouloir programmer l'arduino micro. Et ... impossible de voir l'arduino sur le port usb. Le port série USB est grisé.
C'est un arduino officiel, normalement le bootloader est dessus, si je ne dis pas de bêtise.
Si j'en crois la doc, il n'y a rien à faire pour que ce soit reconnu : https://www.arduino....noLeonardoMicro. On y apprend que le micro n'a qu'un microcontroler (contrairement au uno et au mega). Bien, si on reset, ça coupe la liaison série usb. Ok noté. Mais ça n'explique pas.
Cela ressemble au pb de Nino : http://www.robot-maker.com/forum/topic/10561-probleme-de-driver-arduino-nano/
J'ai creusé dans google. D'autres on aussi ce problème. Je lis qu'il faudrait un driver FTDI (http://www.ftdichip.com/Drivers/VCP.htm). J'installe ce fameux driver mais sans succès.
Je lis aussi que des mecs ont résolu le pb en changeant de câble usb. Câble défectueux ?
Bah non pas moi  Je tente quand même le truc. Alors pour les prochaines fois, faire gaffe : il y a des câbles usb qui ne servent qu'à alimenter. Les fils data ne sont pas reliés !!!
Je tente quand même le truc. Alors pour les prochaines fois, faire gaffe : il y a des câbles usb qui ne servent qu'à alimenter. Les fils data ne sont pas reliés !!!
pfff ... quel me.de ces câbles micro usb !!
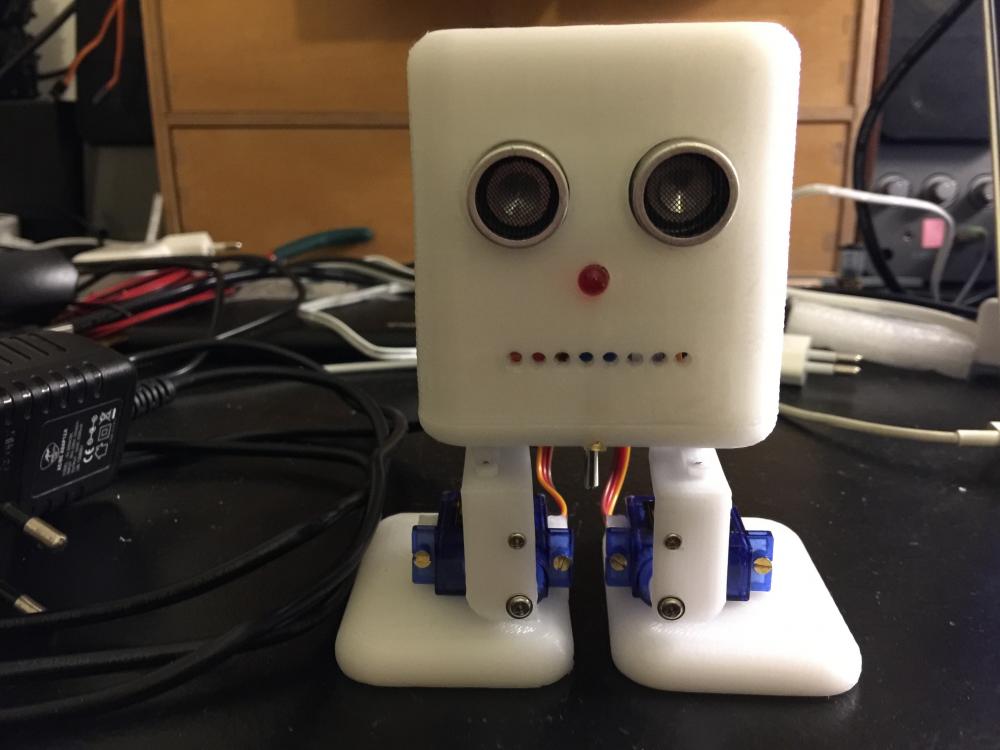
Alors on continue, voilà ce que j'ai en tête. Le Bob aura une position fonction de la distance qu'il lira via le capteur ultrason.
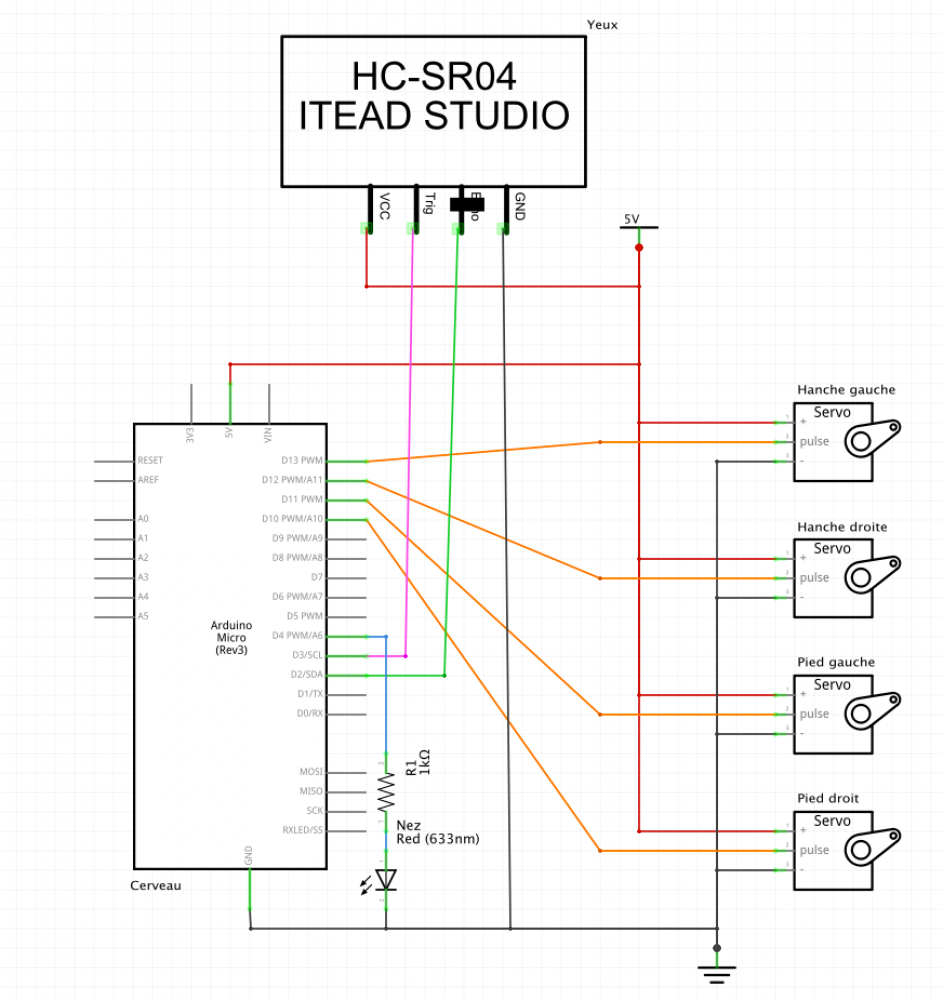
[Edit] Le schéma est modifié. Le arduino micro de fritzing est faux. le D12 n'est pas une sortie PWM. J'ai changé le pin. Et le nez (led rouge)n'est plus commandé par l'arduino mais c'est un témoin d'alimentation.
Modifié par Path, 12 juillet 2016 - 02:33 .