
Salut!
ça fait longtemps que j'aurais dû commencer ce sujet mais j'y ai pas trop pensé...
Alors voilà: pour notre PPE de cette année, nous avons choisi comme problèmatique la recharge automatique d'une base roulante, dans le cadre par exemple d'un robot domestique tel que le Roomba.
Voici le c-d-c:
-détection de batterie faible
-retour à la station+docking entièrement automatique
-sécurité (risques d'électrocution)
nous avons choisi l'infrarouge pour la balise (http://www.robot-mak...pteur-ir-38khz/) puis du suivi de ligne pour le docking (http://www.robot-mak...h__1#entry37678) pour l'alimentation du robot, une LiPo 4s (14,8V) et deux régulateurs de tension kibuck (http://www.robot-mak...h__1#entry36444)
voici ce que nous avons réalisé pour l'instant:
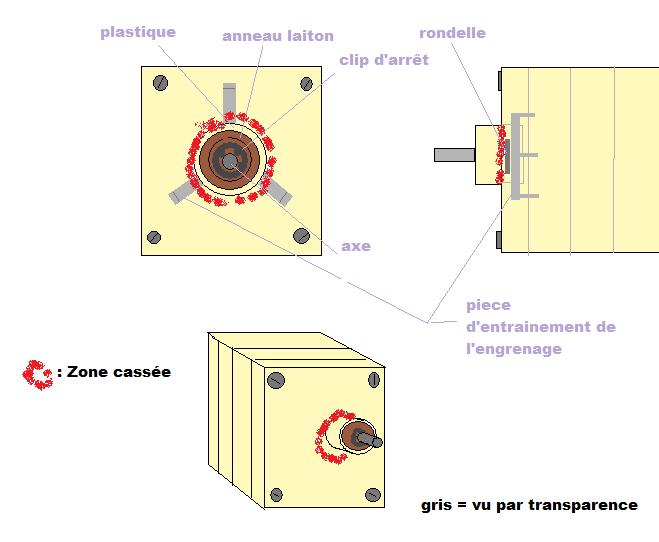
-la moitié du châssis (propulsion + roues+ support) mais nous nous sommes heurtés à un problème embêtant (toujours pas vraiment résolu d'ailleurs): un des moteurs s'est cassé et n'est pas complètement réparé (http://www.robot-mak...h__1#entry37754)
-les schémas électroniques de la balise+typon en cours+prototype
-les recherches et la conception du mode de rechargement
-l'algorigramme principal du robot
Voilà, on est pas mal à la bourre mais j'espère qu'on aura un prototype fonctionnel à temps...
Je posterai dès ce soir les photos et autres documents sur ce qu'on a fait et j'aurai pas mal de questions aussi 
p-s: je ne sais pas si il faut que je poste ce sujet sur aide TPE ou ici mais ce n'est pas très important, si?

#1

-
- Membres
-

- 626 messages
Membre passionné
- Gender:Male
Posté 02 mars 2012 - 02:35

#3
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 07 mars 2012 - 12:23
-photos châssis:
-photo prototype émetteur balise:
-photo batterie+chargeur+alim:

-schéma balise:
-algo robot:
-pièces SolidWorks:
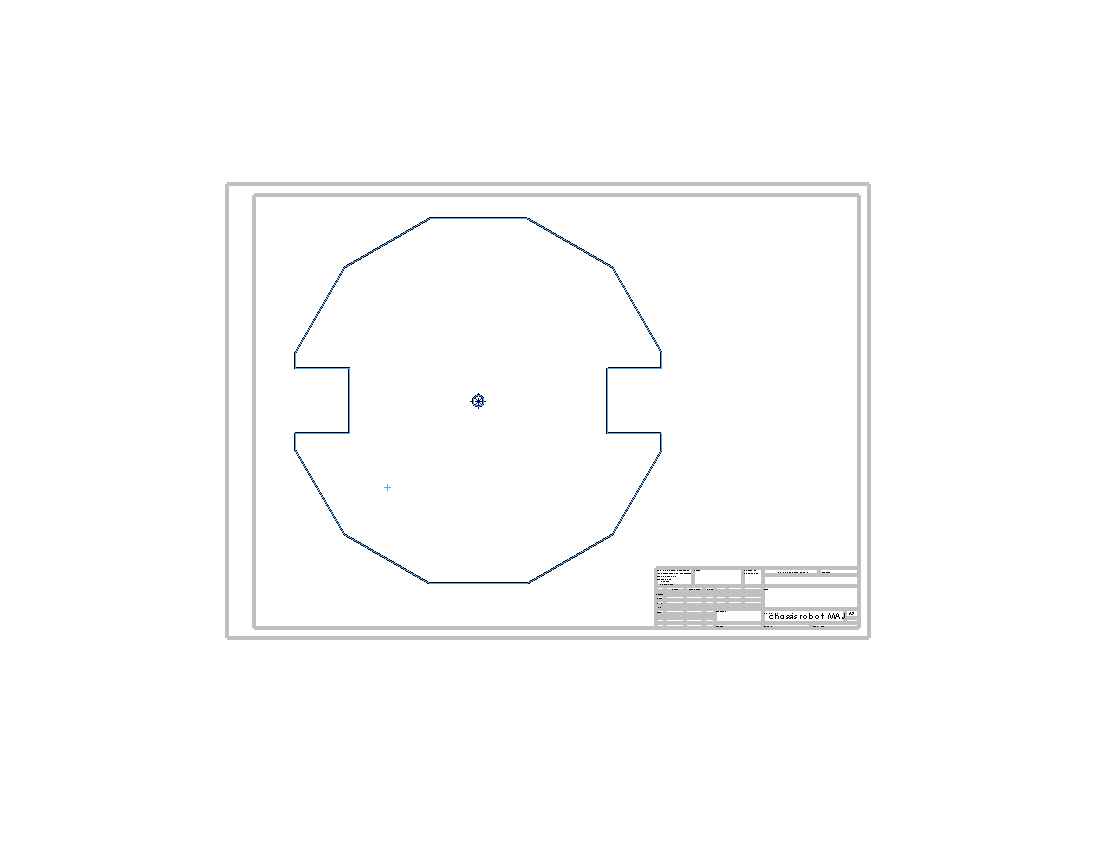
 chassis robot MAJ.PDF 52,88 Ko
461 téléchargement(s)
chassis robot MAJ.PDF 52,88 Ko
461 téléchargement(s)-autres:
-Sujets du forum reliés:
http://www.robot-mak...h__1#entry39423
http://www.robot-mak...h__1#entry36444
http://www.robot-mak...h__1#entry37678
http://www.robot-mak...h__1#entry37754
http://www.robot-mak...h__1#entry35897
http://www.robot-mak...h__1#entry38984
voila, c'est un peu lourd comme post mais au moins c'est fait...

#4
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 07 mars 2012 - 12:33
-le problème de l'émetteur IR + si le schéma est correct + le typon (je sais pas faire, si qqn pouvais me l'expliquer
(ou me le faire à ma place ))-l'algo (si il est bon)
-si quelqu'un a déjà fait un projet de ce type, je veux bien des infos
p-s: voici un site passionnant (en anglais) sur le sujet: http://www.schursast...ckinglogic.html
#5
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 07 mars 2012 - 11:47
Je ne peux pas attacher les fichiers mais je peux les mailer si vous voulez...
#6
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 14 mars 2012 - 06:29
j'ai enfin fini le prototype de l'émetteur de la batterie, je mettrai le schéma et des photos des tests vendredi (si je n'oublie pas). 9a marche sans problème, nous avons rajouté un morceau de paille sur la diode IR pour limiter l'angle du cône. Le signal reçu est un signal carré de Th~=600µs et Tb~=600µs. Le truc est qu'il faudrait un composant entre le TSOP et la Arduino qui transforme ce dernier signal en signal continu (pour pas avoir à le décoder avec celle-ci). Il faudrait aussi que je trouve une sorte de récepteur "analogique" qui permette d'avoir une approximation de la distance entre le robot et le beacon.
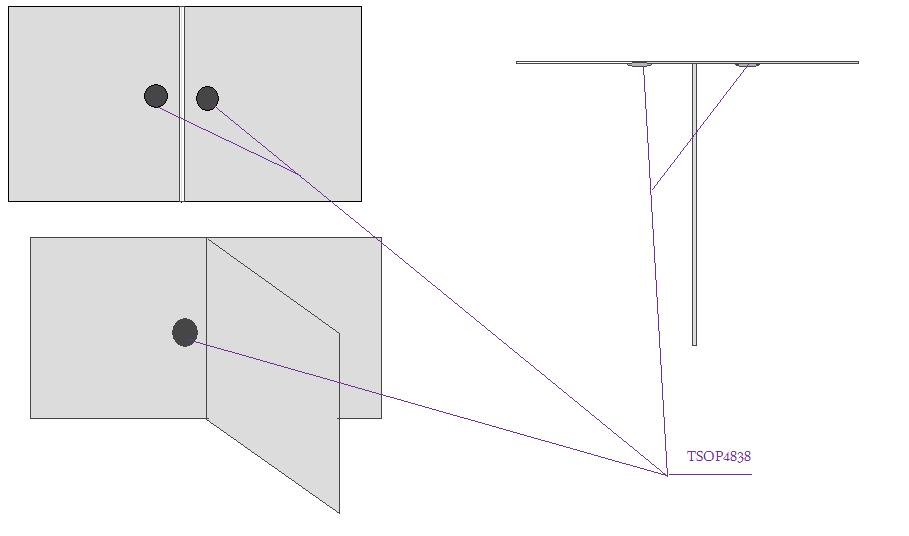
Nous avons également fait le "T" en alu sur lequel se trouveront deux TSOP afin de déterminer la position de la balise (schéma dès que possible).
Si vous connaissez le moyen de décoder le signal du récepteur (comme expliqué plus haut) et/ou un capteur IR analogique pour la distance, ainsi que la question du typon qui tient toujours, n'hésitez pas à me le dire
)Merci
EDIT: ça y est, j'ai fait les schémas, photos demain.
schéma du test:
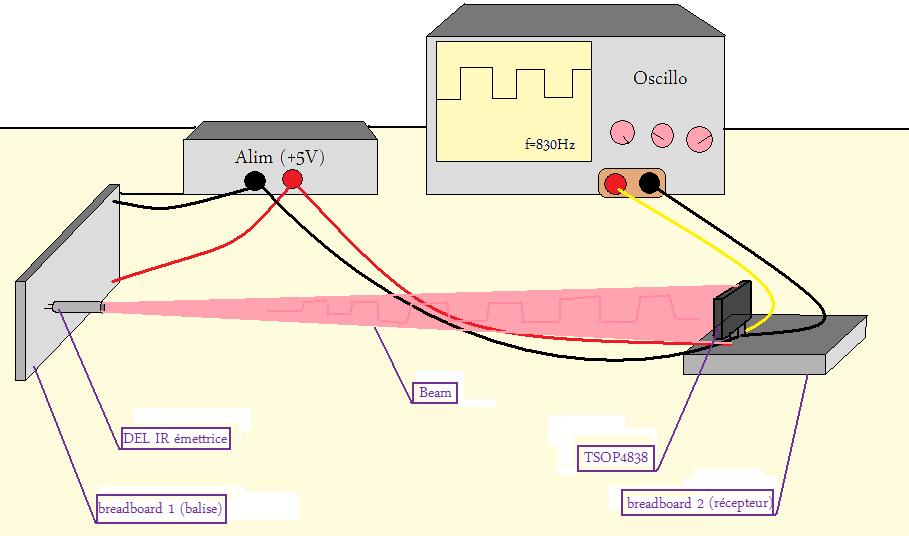
schéma du montage permettant de déterminer la position du robot par rapport à la balise:
Image(s) jointe(s)
#7
-

- Membres
-
- 1â¯032 messages
Membre chevronné
- Gender:Male
Posté 15 mars 2012 - 12:14
j'ai aucune info a te communiquéCoucou!
j'ai enfin fini le prototype de l'émetteur de la batterie, je mettrai le schéma et des photos des tests vendredi (si je n'oublie pas). 9a marche sans problème, nous avons rajouté un morceau de paille sur la diode IR pour limiter l'angle du cône. Le signal reçu est un signal carré de Th~=600µs et Tb~=600µs. Le truc est qu'il faudrait un composant entre le TSOP et la Arduino qui transforme ce dernier signal en signal continu (pour pas avoir à le décoder avec celle-ci). Il faudrait aussi que je trouve une sorte de récepteur "analogique" qui permette d'avoir une approximation de la distance entre le robot et le beacon.
Nous avons également fait le "T" en alu sur lequel se trouveront deux TSOP afin de déterminer la position de la balise (schéma dès que possible).
Si vous connaissez le moyen de décoder le signal du récepteur (comme expliqué plus haut) et/ou un capteur IR analogique pour la distance, ainsi que la question du typon qui tient toujours, n'hésitez pas à me le dire
Merci
mais je trouve ton sujet tres interréssant
vivement que tu mettes les photos, schema,
@+
#8
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 15 mars 2012 - 08:07

#10
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 18 mars 2012 - 10:42
Grâce à l'aide de BlackTemplar, j'ai pu réaliser un filtre passe-bas permettant de convertir le signal en sortie du TSOP (un genre de PWM) en signal analogique. Je vais ensuite comparer ce signal à une tension de référence afin de savoir si le signal est reçu ou non (voir http://www.robot-mak...signal-continu/)
Nous avons donc presque fini la partie conception (excepté peut-être le choix du type d'électrodes pour le rechargement) mais il nous reste toute (ou presque) la réalisation: montage complet du robot: batteries, circuit de puissance, ball caster à acheter et monter, détecteurs de lignes...; la balise à créer (boîtier et circuit en "dur") d'ailleurs sans vouloir paraître insistant, ma question du typon tient toujours, je suis vraiment en galère! et l'insoleuse-graveuse du lycée est en panne donc si quelqu'un en possède une et qu'il peut me faire la carte (moyennant rémunération of course
) je serai ravi!Il nous reste aussi le code à faire (ce qui ne devrait pas poser trop trop de problèmes étant donné que certains morceaux du code ainsi que l'algo sont déjà faits)
En bonus une video de la balise/récepteur en test
: test balise.wmv 1,67 Mo
447 téléchargement(s)
test balise.wmv 1,67 Mo
447 téléchargement(s)
#11
-

- Membres
-
- 160 messages
Membre occasionnel
- Gender:Male
Posté 18 mars 2012 - 11:03
salut!
Grâce à l'aide de BlackTemplar, j'ai pu réaliser un filtre passe-bas permettant de convertir le signal en sortie du TSOP (un genre de PWM)
...
En bonus une video de la balise/récepteur en test
bon boulot !!! plein d'inspiration !!! sujet super sympa à suivre !!!
pour ton circuit imprimé, ya des boites sur le net pas trop cher....
...................................................
Mon premier projet arduino...
Blog de ma Tondeuse RC...
...................................................
#12
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 21 mars 2012 - 08:24
petite mise-à-jour:
Nous avons réglé le problème d'adaptateur du chargeur de batteries mais pas reçu les régulateurs (un problème qui vient du lycée, pas de Kibucks) donc nous restons encore un peu bloqués pour le moment :/
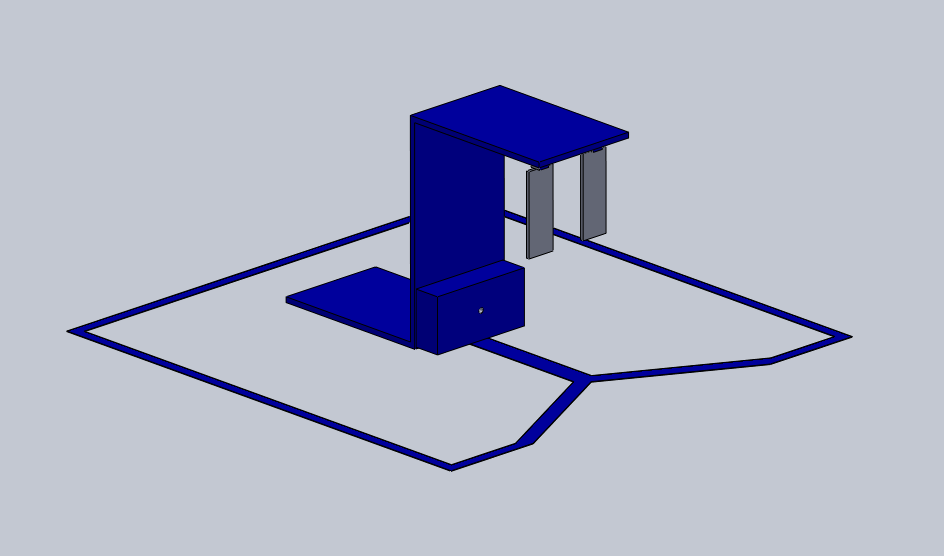
Sébastien (celui qui s'occupe de la modélisation et de la réalisation des parties mécaniques genre le châssis du robot) à dessiné un première idée de la station, mais nous allons sûrement modifier des choses (les contacts de rechargement par exemple). Voici une capture d'écran:
Pour le circuit de l'émetteur, un professeur du lycée va nous faire le typon et la carte à partir du schéma du circuit (apparemment il y a en plus de l'insoleuse-graveuse en panne une machine fabriquant des circuit par usinage... Je n'en sais pas plus!) donc plus de problème à ce niveau
Nous allons acheter d'ici peu (je ne sais pas quand) 2 ball-caster et 3 modules de suivi de ligne à Lextronic (même si c'est excessivement cher :/ ) et nous pourrons donc nous mettre (enfin) à la réalisation du robot+balise, aux tests et à la programmation (en espérant que les régulateurs arrivent un jour, ce dont je doute --' )
#13
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 21 mars 2012 - 08:49
Nous essayons aussi de trouver une formule qui permet de calculer l'angle d'un cône de réception/émission après passage dans un tube (je peux faire un schéma si ce n'est pas clair) en fonction de la taille (longueur et diamètre du tube) et de l'angle d'entrée afin de pouvoir déterminer/régler la couverture d'un pièce par les beam IR et de positionner les 3 LEDs émettrices en conséquence. Nous avons déjà demandé à la prof de physique et fait pas mal de recherches mais ça s'annonce complexe >< (il y a la diffraction du tube, le réflexion du rayon sur les parois du tube et beaucoup d'autres paramètres qui rentrent en compte apparemment...) Si quelqu'un a une idée...
#14
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 01 avril 2012 - 12:48
Mauvaise nouvelle: le prototype de la balise ne marche plus...
Alors que ça marchait très bien avant, ça me fait maintenant le même problème que Bennurre (http://www.robot-mak...l__tsop__st__20): ça marche pendant environ une seconde puis la sortie de TSOP se modifie (le Tb réduit jusqu'à ce que le signal soit continu). J'avais mis environ 600µs de pause pour 600µs de salve. D'après hmnrobots il faut minimum 15ms de pause pour 90ms de salve max mais quand je lis la datasheet (http://www.vishay.com/docs/82090/tsop48xx.pdf page 5), je vois:
- minimum burst length: 10 cycles/burst
- After each burst of length: 10 to 70 cycles; a minimum gap time is required of: >= 12 cycles
- For bursts greater than 70 cycles; a minimum gap time in the data stream is needed of > 4 x burst length
Si je mets 90ms de salve, j'ai 90E-3/(1/38000)=3420 cycles?? c'est énoorme... Avec mes 600µs de salve j'ai 23 cycles je prend environ 25 cycles de pause donc 658µs de pause!
Si quelqu'un pouvait me dire où se trouve l'erreur
merci
#15
-
- Membres
-
- 160 messages
Membre occasionnel
- Gender:Male
Posté 01 avril 2012 - 05:14
Re!
Mauvaise nouvelle: le prototype de la balise ne marche plus...
Alors que ça marchait très bien avant, ça me fait maintenant le même problème que Bennurre (http://www.robot-mak...l__tsop__st__20): ça marche pendant environ une seconde puis la sortie de TSOP se modifie (le Tb réduit jusqu'à ce que le signal soit continu). ...
Si quelqu'un pouvait me dire où se trouve l'erreur
merci
Pour ma part, je devais faire des modif de temps des salves mais, j'ai mis en pause la balise, histoire de finir le reste du robot...
...................................................
Mon premier projet arduino...
Blog de ma Tondeuse RC...
...................................................
#16
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 01 avril 2012 - 06:29
Pour ma part, je devais faire des modif de temps des salves mais, j'ai mis en pause la balise, histoire de finir le reste du robot...
et tu sais quelles modif tu devais faire?
#17
-
- Membres
-
- 160 messages
Membre occasionnel
- Gender:Male
Posté 01 avril 2012 - 06:40
et tu sais quelles modif tu devais faire?
Je devais faire des modifs au niveau du temps des salves, mais je ne les ai plus en tête, je regarde et je te dis quoi! C'est un composant qui paraît simple d'utilisation, mais il est quand même pointu au niveau du calibrage... Bon courage!
...................................................
Mon premier projet arduino...
Blog de ma Tondeuse RC...
...................................................
#18
-

- Membres
-
- 316 messages
Habitué
- Gender:Male
- Location:Périphérie Nantes
Posté 01 avril 2012 - 09:27
Oups pardon je n'avais pas vu : TSOP48
http://hmnrobots.blogspot.fr/
#19
-
- Membres
-
- 316 messages
Habitué
- Gender:Male
- Location:Périphérie Nantes
Posté 01 avril 2012 - 09:37
de mémoire le burst était constitué d'une cinquantaine de périodeRe!
Mauvaise nouvelle: le prototype de la balise ne marche plus...
Alors que ça marchait très bien avant, ça me fait maintenant le même problème que Bennurre (http://www.robot-mak...l__tsop__st__20): ça marche pendant environ une seconde puis la sortie de TSOP se modifie (le Tb réduit jusqu'à ce que le signal soit continu). J'avais mis environ 600µs de pause pour 600µs de salve. D'après hmnrobots il faut minimum 15ms de pause pour 90ms de salve max mais quand je lis la datasheet (http://www.vishay.com/docs/82090/tsop48xx.pdf page 5), je vois:étant donné que j'ai des salves cadencées à 38kHz, j'ai une durée de cycle de environ 26µs donc une salve minimum de 260µs (0.26ms) et une pause min correspondante de 315µs (0.32ms)...
- minimum burst length: 10 cycles/burst
- After each burst of length: 10 to 70 cycles; a minimum gap time is required of: >= 12 cycles
- For bursts greater than 70 cycles; a minimum gap time in the data stream is needed of > 4 x burst length
Si je mets 90ms de salve, j'ai 90E-3/(1/38000)=3420 cycles?? c'est énoorme... Avec mes 600µs de salve j'ai 23 cycles je prend environ 25 cycles de pause donc 658µs de pause!
Si quelqu'un pouvait me dire où se trouve l'erreur
merci
en fait 40 :
//puis Emission de 40 périodes IR
for(cpt=0;cpt<40;cpt++){
Output_high(LED_IR);
delay_cycles(12);
Output_low(LED_IR);
delay_cycles(5);
}
Output_low(LED_TxIR);
delay_ms(50); //pour ne pas saturer son propre récepteur
http://hmnrobots.blogspot.fr/
#20
-
- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 02 avril 2012 - 12:25
Ah tu le faisais avec une arduino... parceque si il y a environ 40 periodes dans une salve pour 50ms de pose, ça fait un rapport cyclique de environ 2% et donc c'est impossible à réaliser avec un 555 astable!de mémoire le burst était constitué d'une cinquantaine de période
en fait 40 :
//puis Emission de 40 périodes IR
for(cpt=0;cpt<40;cpt++){
Output_high(LED_IR);
delay_cycles(12);
Output_low(LED_IR);
delay_cycles(5);
}
Output_low(LED_TxIR);
delay_ms(50); //pour ne pas saturer son propre récepteur
je vais retourner voir le post de Bennurre pour tester
Répondre à ce sujet









3 utilisateur(s) li(sen)t ce sujet
0 members, 3 guests, 0 anonymous users

