
TOME 4 : Les fichiers du TOME 4 sont ici.
Longue a ĂŠtĂŠÂ la gestation du projet JEKERT. Le dĂŠveloppement logiciel est globalement Ă son terme. Les changements de stratĂŠgie ont ĂŠtĂŠ nombreux avec des modifications importantes de l’approche et des dialogues entre l’homme et la petite machine. Par exemple au risque de rendre le programme source moins lisible on a gagnĂŠ une place considĂŠrable en mĂŠmoire de programme et en mĂŠmoire dynamique en plaçant les textes en EEPROM de l’ATmega328. Au dĂŠbut du dĂŠveloppement logiciel il semblait que piloter les moteurs en indiquant des angles de position relevait de l’ĂŠvidence. Rapidement c’est la notion de posture qui a dominĂŠ le dĂŠbat et c’est la variable Consigne exprimĂŠe dans un int qui s’est imposĂŠe. Les butĂŠes logicielles pour ne pas amener les moteurs en ÂŤÂ incident de rotation continue  ont ĂŠtĂŠ abandonnĂŠes, car ce sont finalement les limites d’encombrement ou d’angles de balayages angulaires qui sont maintenant traitĂŠes dans le logiciel.
Chamboulement dans le dialogue Homme / Machine on a introduit les commandes Ă un seul caractère puis les caractères de rĂŠpĂŠtition pour les programmes de dĂŠplacements de base. L’affectation des diverses EntrĂŠes / Sorties a subi pas mal de permutations pour optimiser l’utilisation des broches de l’ATmega328. Le multiplexeur est lui mĂŞme mis Ă contribution sur S13, S14 et S15 pour piloter des LEDs au lieu de servomoteurs sa vocation de base. Pour faciliter la rĂŠalisation du circuit imprimĂŠ principal, le signal du potentiomètre est passĂŠ de A1 vers A0. (Ăviter de croiser des liaisons entre pistes cuivrĂŠes.) Un système technique n’est jamais dĂŠfinitivement figĂŠ, on peut toujours s’attendre Ă des ĂŠvolutions. NĂŠanmoins, ce jour JEKERT est stabilisĂŠe et les structures tant matĂŠrielles que logicielles sont considĂŠrĂŠes comme viables. Il reste 1742 octets de disponibles pour corriger un ĂŠventuel ÂŤÂ bug  ou ajouter une adaptation de dernière minute, soit une bonne marge de sĂŠcuritĂŠ. On peut raisonnablement envisager la rĂŠalisation des divers circuits imprimĂŠs et l’assemblage final.
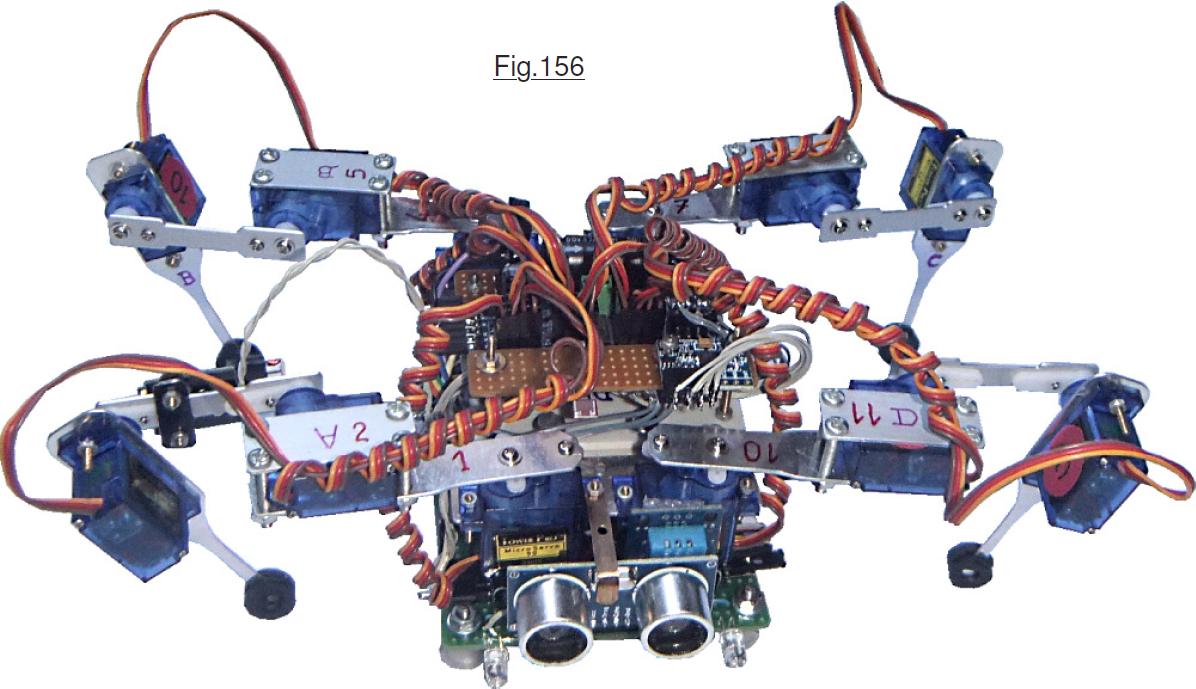
Sur la Fig.156 la petite sonde JEKERT est au repos sur ses quatre sabots. Les lignes ĂŠlectriques ont ĂŠtĂŠ coiffĂŠes correctement pour ne plus engendrer des risques d’interfĂŠrence avec les membres. Mis Ă part les filtres du spectroscope chromatique, la petite machine est entièrement achevĂŠe. Les chaussettes dĂŠfinitives sont en place. L’ensemble des capteurs et effecteurs sont intĂŠgrĂŠs Ă la structure.
La suite est ici.