


Construit à partir d'un jouet à friction, voici mon robot autonome Wall-E.
il fonctionne grâce à un microcontrôleur ATTINY2313 dont le code est écrit avec le logiciel Arduino une librairie pour certains Attiny dont le 2313.
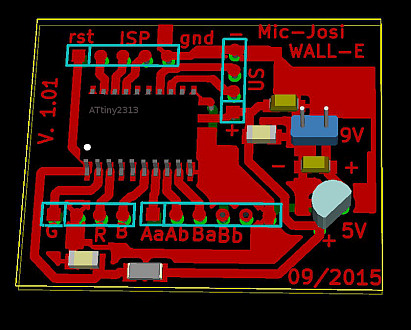
j'ai fait la carte pour l'attiny2313 et son un régulateur 78L05 avec le logiciel KiCad
on utilise un module Ultra-Sons HC-SR04
un module H-Bridge L9110 pour 2 moteurs
deux moteurs 3 à 10 Volts PPN
2 LED SMD RGB 5050
une batterie 9 Volts pour la carte attiny et les LED
une batterie Li-Ion 3,7 Volts pour la carte des moteurs
un régulateur 78L05
je joins quelques photos et i le fichier PDF de sa construction qui comprend les liens utiles(doc, programme ino, fichier hex,vidéo )
 Wall-E-FR.pdf 12,76 Mo
1010 téléchargement(s)
Wall-E-FR.pdf 12,76 Mo
1010 téléchargement(s)
Et moi je rajoute le lien vers sa fiche très bien faite publiée sur le Robotscope 
http://www.robot-maker.com/robotscope/base-roulante/wall-e-autonome_i59
Image(s) jointe(s)




Modifié par Webmaster, 14 septembre 2015 - 07:30 .
Ajout de la fiche Robotscope :)













