


Salut les gars,
De retour sur le forum après quelques mois (années ?) avec un projet que j'ai en tête depuis longtemps. J'aimerais faire un petit robot qui ajuste la hauteur de ses roues en fonction des obstacles qu'il passe (qui en principe devrait rendre le déplacement du robot fluide sur tout type de surface).
A peine le projet commencé, je bloque déjà... En effet, afin d'ajuster la hauteur de mes roues il me faut connaitre la hauteur relative au sol de l'objet et je ne sais pas comment arrivé à ca.
Un petit schéma pour rendre le problème plus clair :
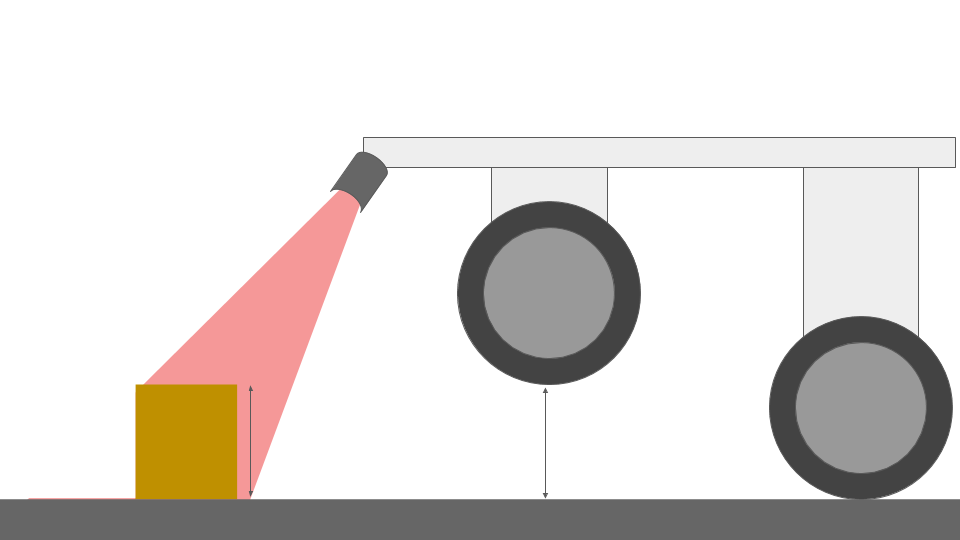
J'ai d'abords pensé mettre un capteur en direction du sol qui détecterais la hauteur d'un objet arrivant dans son champ mais les distances mesuré son trop petites et avec des capteurs "accesibles" la mesure serait trop vague.
J'ai ensuite pensé à mettre le capteur face à l'objet et à le faire remonter doucement mécaniquement jusqu'à ce que son champ passe au dessus de l'objet pour en déduire sa hauteur mais ca me parait compliqué à mettre en oeuvre et pas forcement plus précis :/
Avez vous une idée ?


 J'ai regarder le
J'ai regarder le 











