Bonjour à tous,
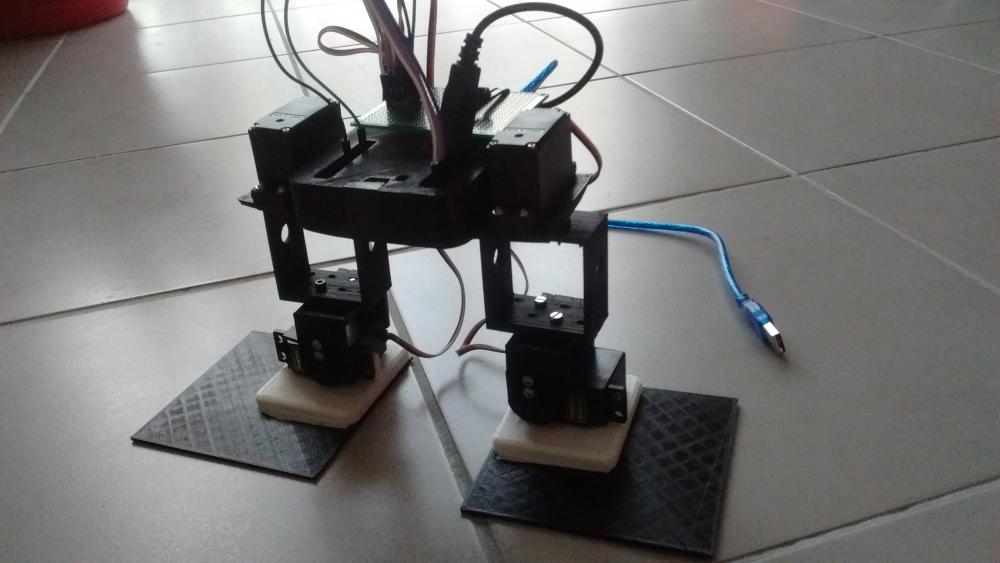
Voici mon robot MobBob, créé par cevinius : http://www.cevinius.com/mobbob/
C'est un robot de type Bipède fonctionnant avec 4 servos moteur 9G, une carte bluetooth Bluno Beetle de chez DFRobotic, une batterie et un téléphone avec android pour le pilotage du robot, la reconnaissance faciale ...


Maintenant qu'il fonctionne je voudrais réaliser ma propre version de MobBob, dans le but de pouvoir le piloter lorsque je ne suis pas chez moi, utiliser la camera du téléphone pour surveiller .
Je pense garder le téléphone portable et donc développer ma propre application android avec le site web Android MIT App Inventor (d’ailleurs si quelqu'un a déjà essayé ?)
A+