


Bonsoir !
Voici un test d'un moteur pas à pas avec un axe creux de 6mm (diamètre intérieur). Bien pratique pour faire passer des câbles à l’intérieur !
C'est un moteur pas à pas unipolaire, qui peut aussi être câblé comme un bipolaire.
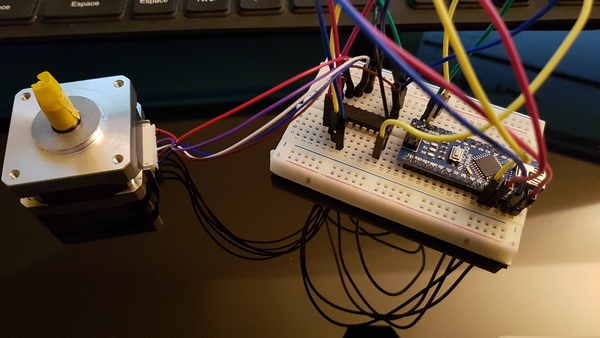
On voit sur la photo que le fil noir n'est pas utilisé (flèche orange), le commun est sur le fil marron (flèche bleu).
Pour l'utiliser comme un bipolaire il suffit de câbler chaque bobine sur un driver de moteur. Pour le teste j'utilise le TB6560 que je contrôle avec un microcontrôleur arduino.
J'utilise ce programme pour faire tourner le moteur en augmentant sa vitesse progressivement:
#include <AccelStepper.h>
AccelStepper stepper(1,9,2); //CLK+ -> D9, CW+ -> D2 (facultatif)
void setup()
{
stepper.setMaxSpeed(500); //Vitesse à atteindre
stepper.setAcceleration(600); //Accélération
stepper.moveTo(40000); //Position angulaire à atteindre
}
void loop()
{
stepper.run();
}
Si vous avez besoin de plus de vitesse, un montage unipolaire devrait augmenter la vitesse max du moteur puisque l'inductance des bobines est plus faible :
L'uln2003 fourni la puissance nécessaire pour faire fonctionner le moteur. Il peut être commandé avec un arduino et la librairie AccelStepper.
Je posterai à la suite l'essai avec un uln2803 similaire à l'uln2003 !
-----------------------------------------------
Voici la suite:
J'ai branché l'arduino comme indiqué dans le programme de test:
#include <AccelStepper.h>
#define Pin1 11 // --> IN4
#define Pin2 12 // --> IN2
#define Pin3 8 // --> IN3
#define Pin4 9 // --> IN1
AccelStepper moteur(AccelStepper::FULL4WIRE, Pin1, Pin3, Pin2, Pin4);
void setup()
{
moteur.setMaxSpeed(350.0); // Vitesse max du moteur
moteur.setAcceleration(50.0);
moteur.moveTo(40000);
}
void loop()
{
//Tourne dans un sens puis dans l'autre
if (moteur.distanceToGo() == 0) {
moteur.moveTo(-moteur.currentPosition());
}
moteur.run();
}
Malgré le faible courant consommé par le moteur (50 ohms par bobine, aliim de 12v) le CI chauffe un peu. Je vous conseille cette méthode si vous devez utiliser le moteur avec une tension plus faible, 5v par exemple.
Par contre à 5v la vitesse max chute à environ 100tr/min.
















