

Bonjour chers makers !
On est 4 étudiants ingénieurs et nous avons décidé de nous lancer dans l'adaptation d'un flipper en système pilotable à distance (Wifi) !
Nous avons acheté un petit flipper Avengers (25€) et nous allons partager avec vous l'avancement de notre projet. Une Raspberry Pi et une caméra nous sont fournis et permettent déjà de piloter un système à distance avec très peu de latence. On vous laisse aller voir le système sur le site de VigiRobotics (https://www.vigirobotics.com/) sur lequel vous pouvez même piloter plusieurs robots de chez vous !
Dans ce premier post on vous présente le flipper, son fonctionnement, les éléments qui le composent et ce que nous avons compris. Nous pensons modifier certaines parties du flipper (en orange sur le schéma d'organisation du flipper) pour qu'elles deviennent pilotables à distance, des idées ?
Voici à quoi le flipper ressemble:

Si vous souhaitez voir comment il fonctionne (modèle similaire):
Explication du jeu
Le flipper fonctionne avec 3 piles LR6 (AA) 1.5V. Deux pièces s’emboitent sous le flipper et servent de support pour incliner le flipper. Un interrupteur derrière le système permet d’allumer l’écran LCD et d’avoir des effets sonores et lumineux.
Pour commencer une partie, l’utilisateur doit lancer la bille. Une fois la bille dans le terrain de jeu, l’objectif est de la conserver le plus longtemps possible en mouvement et d’obtenir le meilleur score possible (qui s’affiche sur l’écran LCD). Pour cela, l’utilisateur doit se servir des deux flippers (leviers) pour renvoyer la balle lorsqu’elle s’apprête à tomber et des points sont marqués lorsque la bille tape un des bumpers. Lorsque la bille tombe entre les deux flippers, la bille doit être relancée. Une partie comprend 3 lancements de bille et une petite roue à côté du lanceur indique le nombre de lancés de bille restant.
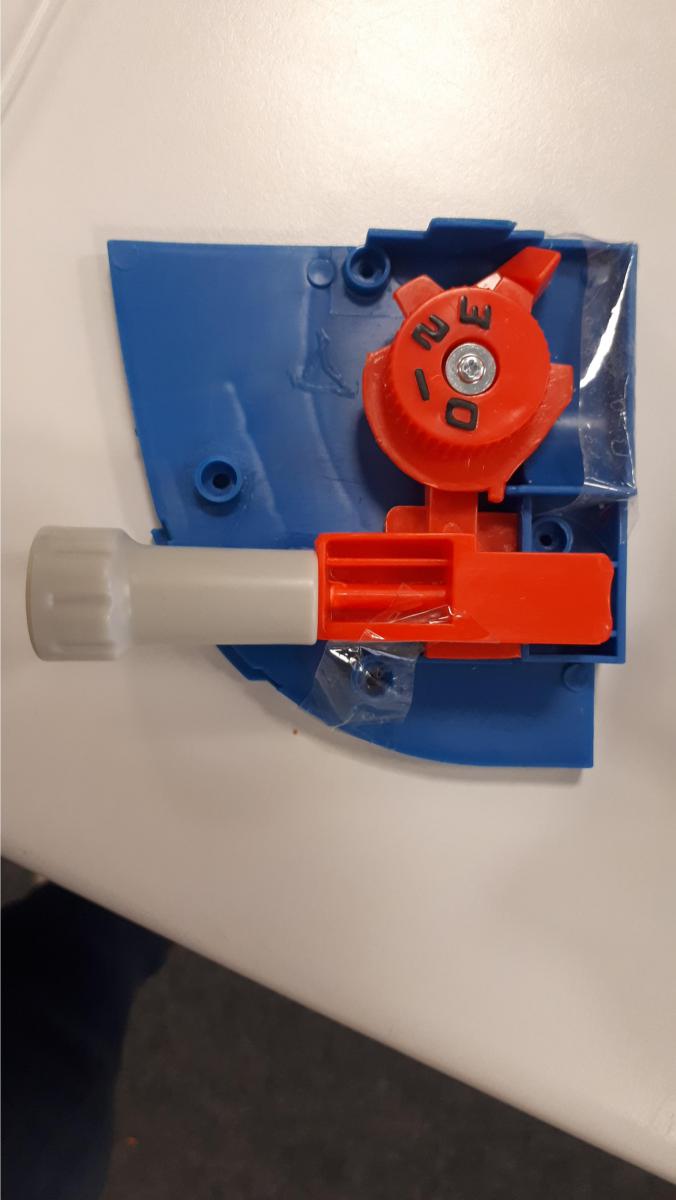
Pour recommencer une partie, il faut tourner la petite roue à côté du flipper pour la remettre sur 0 et appuyer sur le bouton Reset en haut du flipper pour remettre le score sur l’écran LCD à 0.
Intérieur du flipper
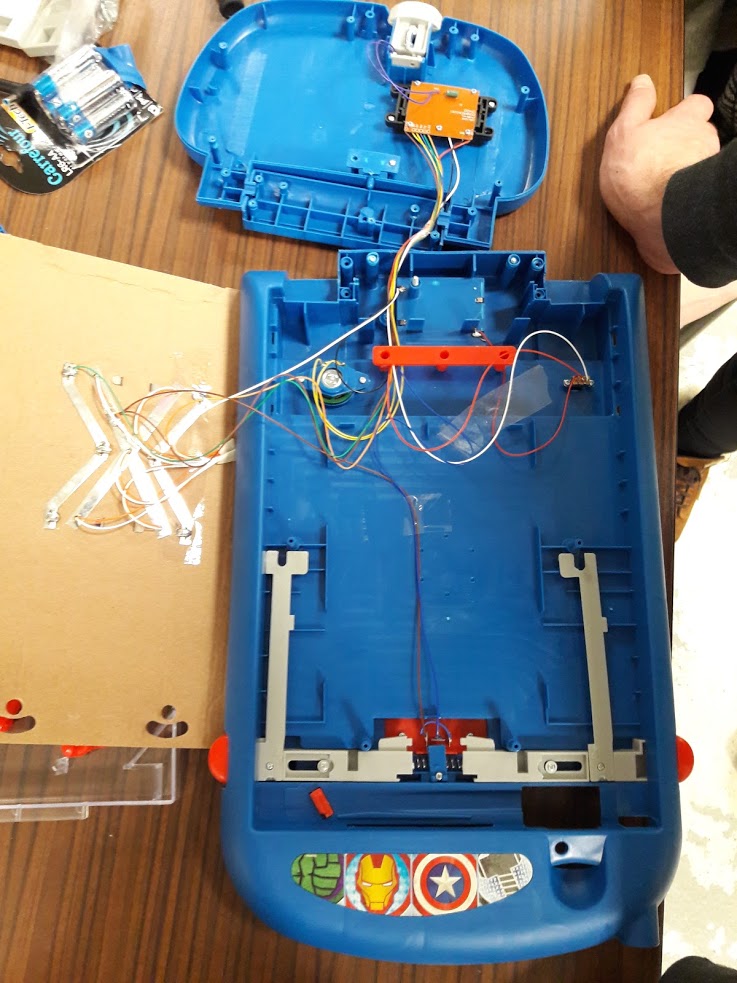
Fonctionnent d’un point de vue mécanique et électronique
- Le Lanceur est composé d’un ressort attaché à un tube en plastique. Ce tube en plastique peut être tiré et est guidé. Il permet de faire tourner une petite roue qui va acheminer la bille. Une fois lâché, le ressort ramène le tube dans sa position initiale. Il percute alors la bille et la propulse dans le terrain de jeu.
- Les bumpers sont composés d’un anneau métallique, un ressort, un disque plastique décoratif et une Led. L’anneau va permettre de compter les points lorsqu’il y a contact entre la bille, le ressort et l’anneau, créant un circuit fermé. A chaque fois que la bille touche l’anneau métallique et le ressort, 10 points sont marqués. Au centre de l’anneau métallique, le ressort entoure la Led pour la protéger, établir le contact et faire rebondir la bille et un disque plastique est posé sur le ressort.
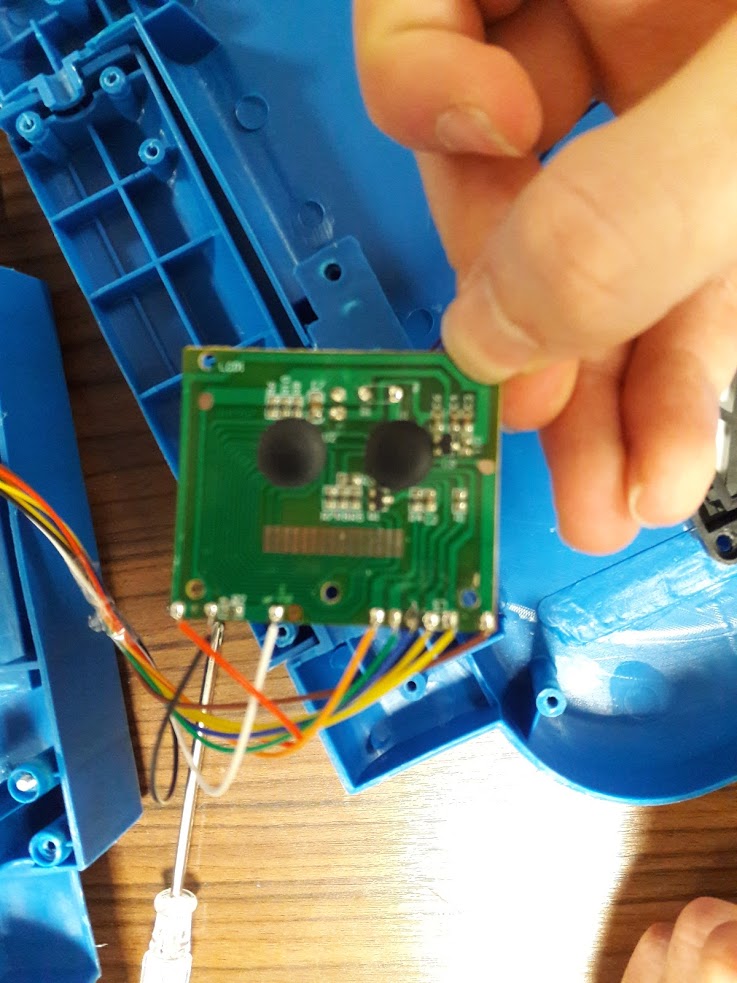
- L’écran LCD permet d’afficher le nombre de points. Il est relié à la carte électronique par 15 pins.
- La carte électronique est reliée au bouton Reset, à l’alimentation, à l’écran LCD, à un haut-parleur et aux bumpers. Elle comprend notamment des résistances pour chaque LED, un condensateur et des composants dissimulés sous deux dissipateurs thermiques.
- Les LEDs et le haut-parleur sont actionnés et créent des effets sonores et lumineux lorsqu’un des 2 flippers est actionné ou quand un des bumpers est touché (anneau métallique + ressort).
- L’alimentation (4.5V) alimente la carte électronique.
Organisation du flipper
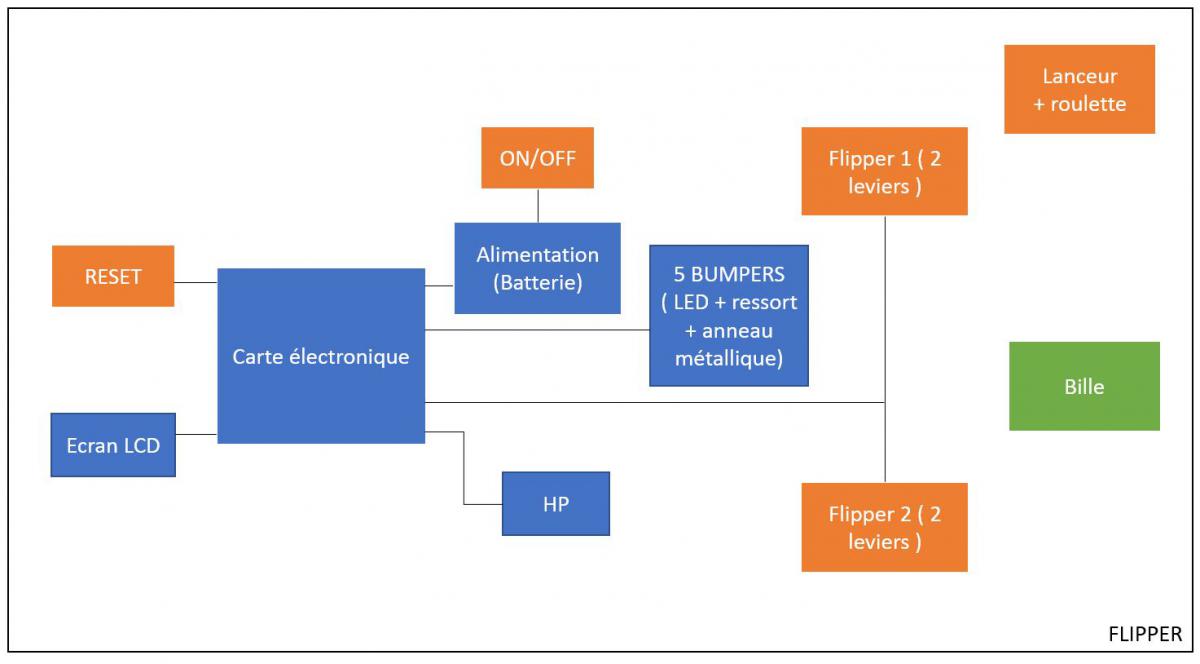
Schéma électronique du système
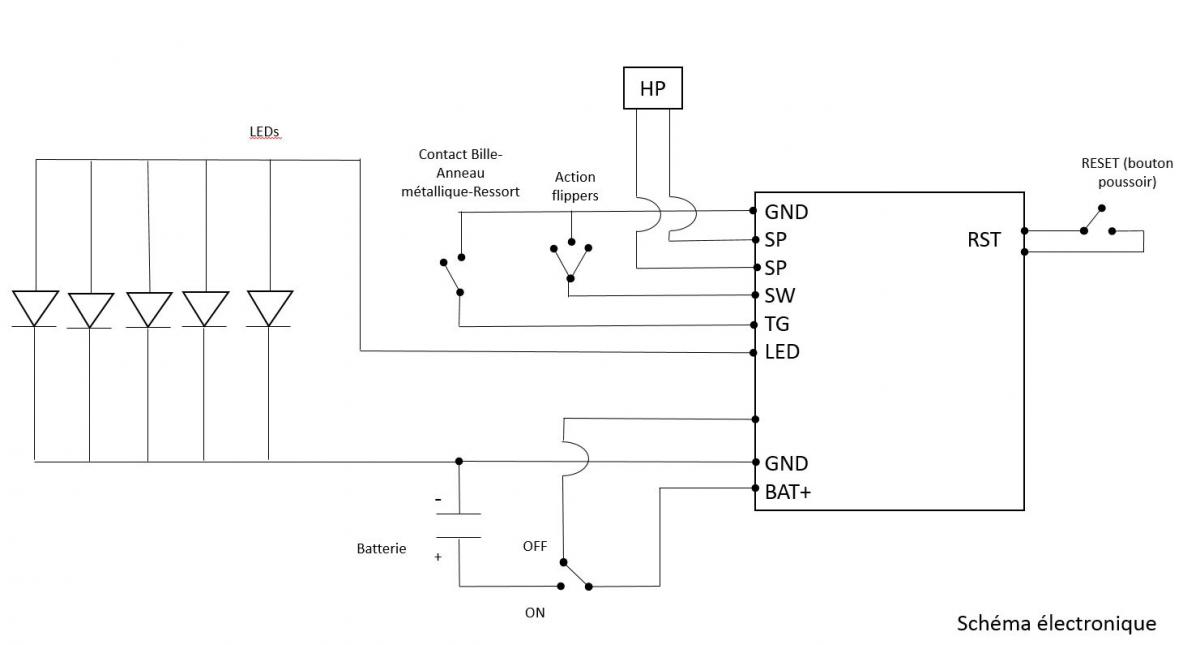
Certains composants (comme les résistances permettant de protéger les LEDs) présents dans la carte ne sont pas représentés sur le schéma.
Les pins d’entrée :
- Le pin BAT+ correspond au pin d’alimentation (batterie) de la carte électronique. L’interrupteur ON/OFF est directement relié à l’alimentation.
- Lorsqu’il y a contact entre la bille et un des anneaux métalliques composant les bumpers, un signal est envoyé à la carte via le pin TG et permet ainsi de compter les points.
- Le pin SW est relié aux deux flippers via un interrupteur ou relais.
- Le pin RST est relié au bouton Reset en haut du flipper.
Les pins de sortie :
- Le pin LED permet d’alimenter les LEDs et ainsi de les piloter.
- Le pin SP est relié au haut-parleur.
- L’écran LCD n’est pas représenté mais est également branché sur la carte via un connecteur 15 pins.
Les flippers (leviers) sont actionnés mécaniquement.
La prochaine étape: trouver des solutions techniques pour rendre les différents éléments du système pilotables à distance (flippers, lanceur, bouton Reset,...). On pense notamment se servir de servomoteurs et de relais. N'hésitez pas à partager vos idées !



 ça pourrait peut être même marcher pour le lanceur.
ça pourrait peut être même marcher pour le lanceur. 













