Bonjour,
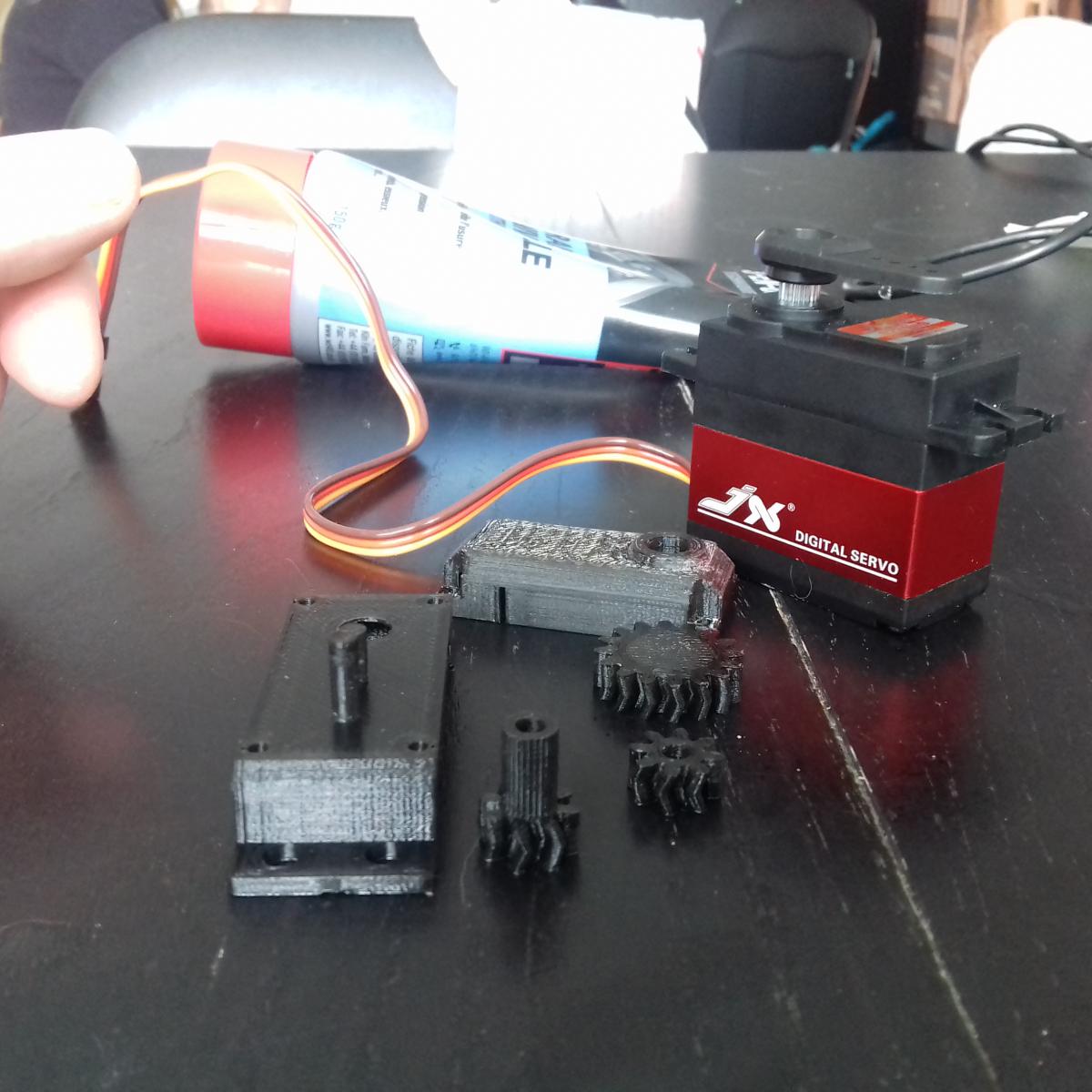
Je vous présente ici ma petite modification du servomoteur jx pdi 6621mg
En effet, pour des besoins sur un projet de bras robotisé, j'ai besoin de modifier ce servomoteur pour qu'il puisse faire un tour complet.
Après quelques recherche, j'ai trouvé des solutions pour le mettre en rotation continue mais c'est pas exactement ce que je souhaite.
Du coup je me suis tournée vers l'ajout d'un train d'engrenage.
De ce fait pas besoin de hacker le servomoteur en lui-même. Il y a cependant une perte de couple de moitié mais dans mon cas cela n'est pas gênant. 10kg/cm m'est largement suffisant.
Voila ce que cela donne :