Bonjour,
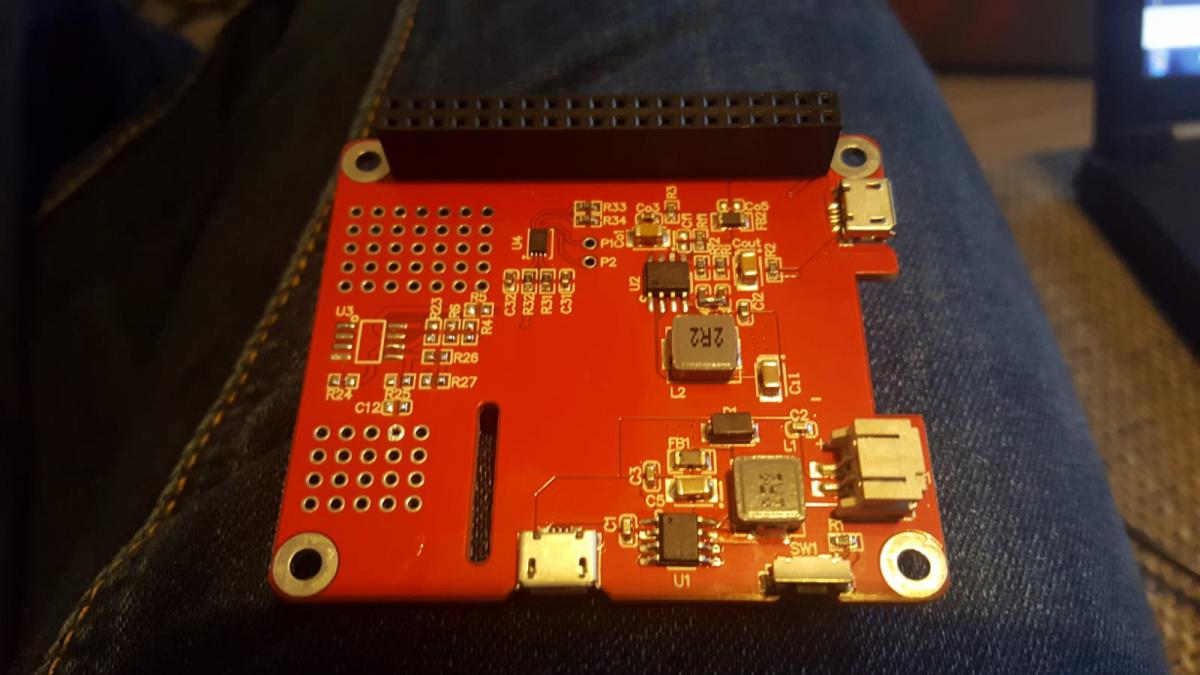
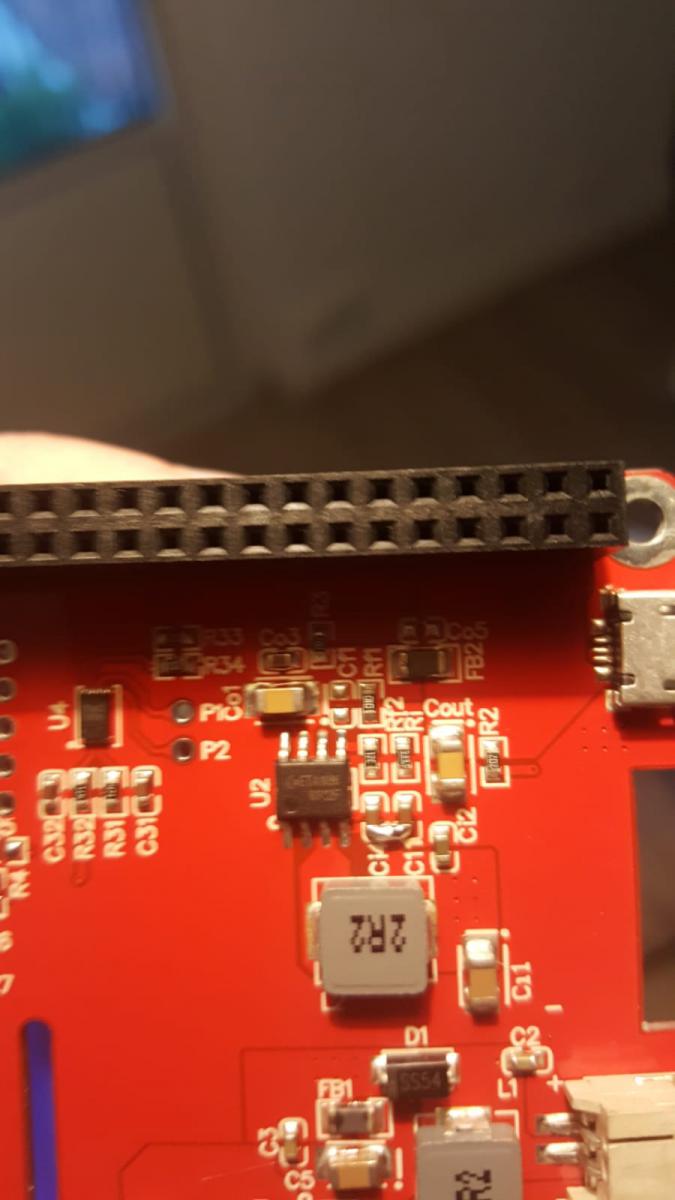
Je viens d'acheter un composant HAT pour le Raspberry pi 3. Voici le modèle : https://www.robot-ma...y=HAT&results=2
Je cherche des infos / tutos / posts sur le composant mais je ne trouve rien. Sous quel nom? référence? dois-je chercher ?
Je rencontre déjà un problème d'alimentation et je cherche du code pour récupérer les datas associées à la batterie.
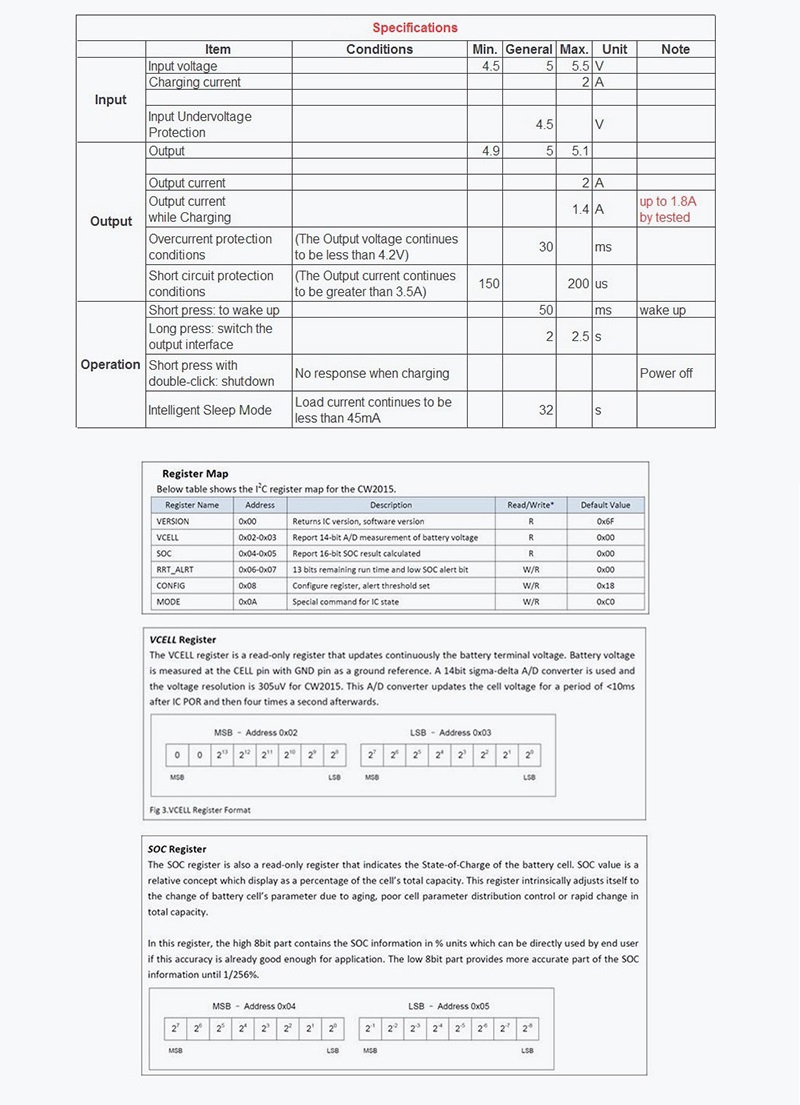
En faisant "i2cdetect -y 1", j'ai un élément détecté à l'adresse 0x62.
Or, je pensais que cet outil pouvait récupérer 2 informations : la tension du courant et la capacité de la batterie. Pourrais-je avoir plus d'informations sur la récupération de ces 2 éléments?
Merci d'avance,
à bientôt,