

28 réponses à ce sujet
#22

Serveurperso
-

- Membres
-

- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 28 janvier 2020 - 06:55
J'ai pas encore réussi à faire fonctionner ce genre d'adaptateur... j'ai pas passé plus de 10 minutes dessus aussi. Je te recommande plusieurs PI3 A+ vu le prix... ça permet d'avoir des trucs autonomes que tu peux placer partout et plus d'I/O
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#23
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage

#24
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 12 février 2020 - 09:34
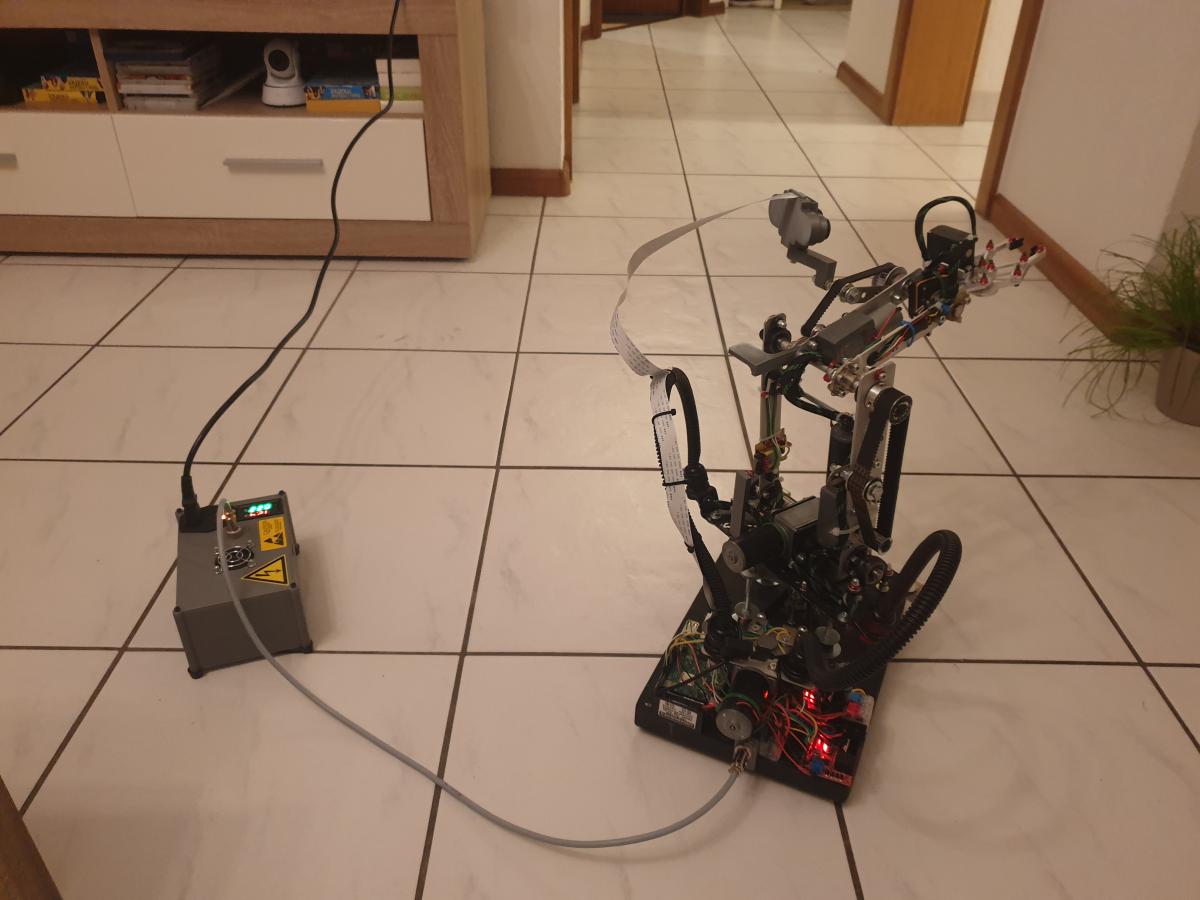
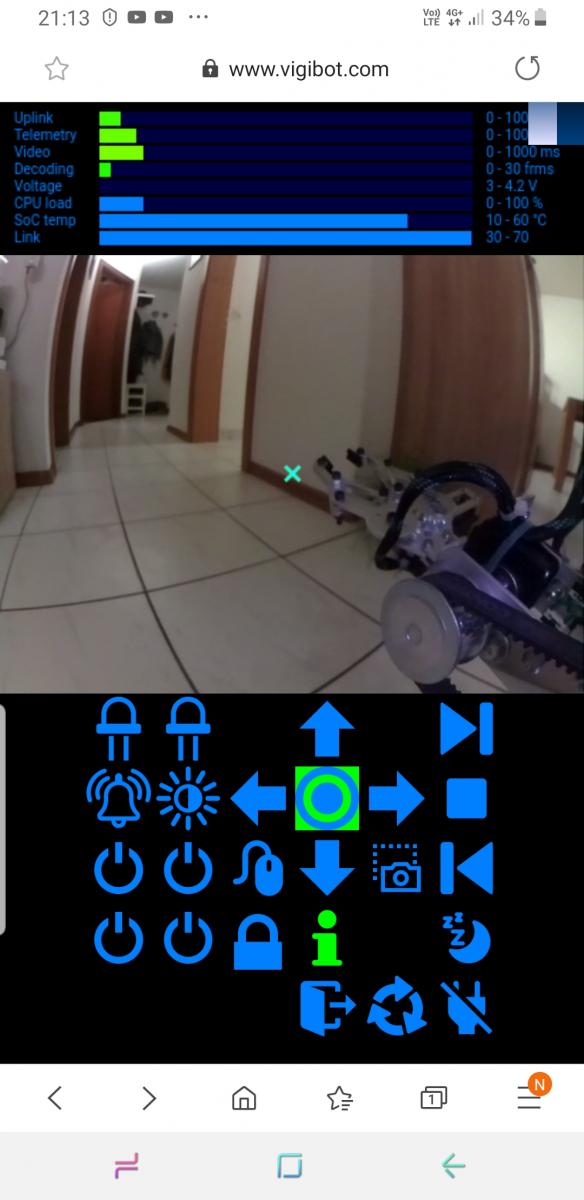
Voila j ai fait les premiers pas en ligne avec d'autres utilisateurs c'etait plutôt fun on a nourri mes chat et attrapé des bouchons ...
J ai rencontré un problème :
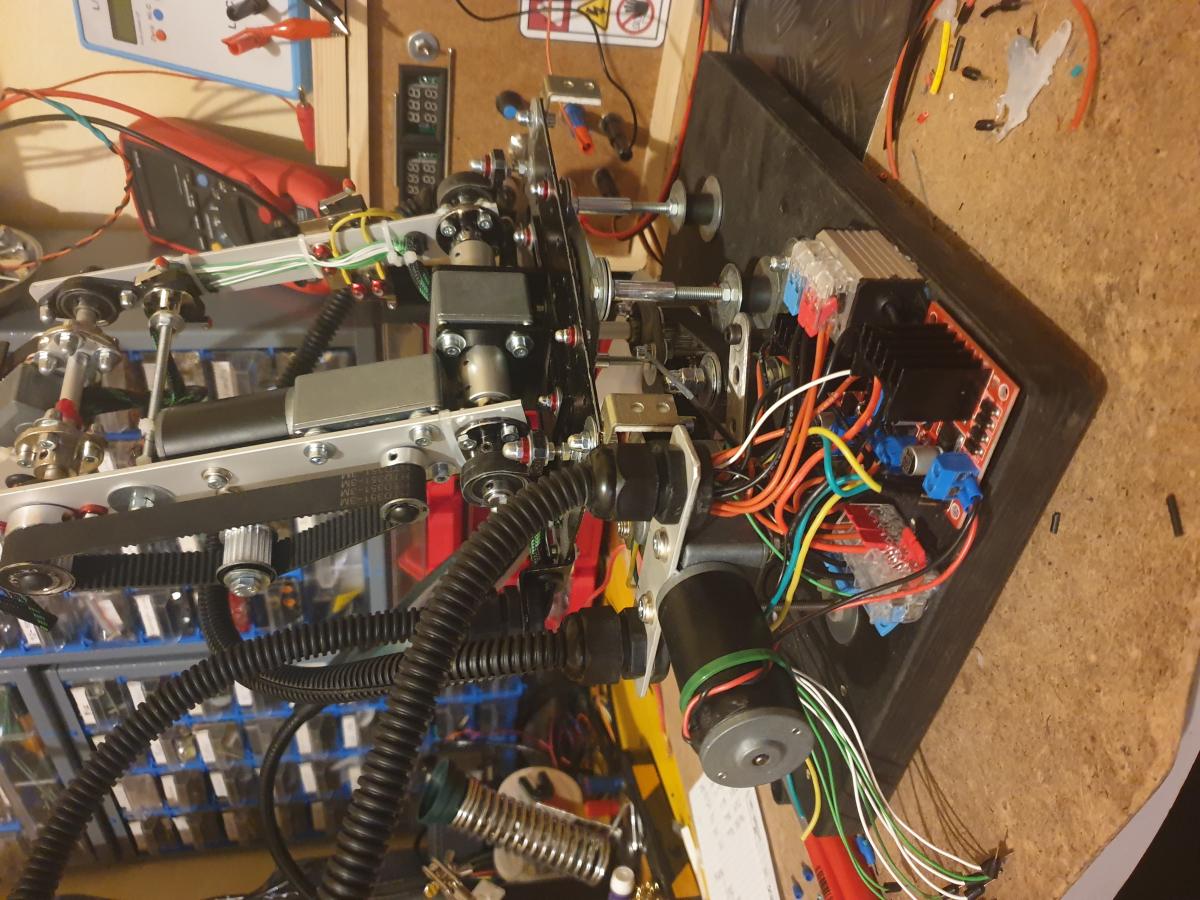
Le servo de la pince a déjà grillé ! Trop de serrage trop longtemps il faudra que je trouve une solution
J ai rencontré un problème :
Le servo de la pince a déjà grillé ! Trop de serrage trop longtemps il faudra que je trouve une solution
Image(s) jointe(s)
#25
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 12 février 2020 - 09:40
La solution est toute simple : tu mets le REINIT sur la pince et ça force l'utilisateur a tenir la souris, quand on lâche hop l'objet tombe
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#26
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 12 février 2020 - 10:33
La solution est toute simple : tu mets le REINIT sur la pince et ça force l'utilisateur a tenir la souris, quand on lâche hop l'objet tombe
Oui mais ca implique qu'on ne peut pas utiliser les autres axes pour deplacer l'objet ou je me trompe ?
#27
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 12 février 2020 - 10:42
Oui t'as raison...
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#29
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 12 février 2020 - 10:55
La solution que j'avais trouvé avec des Dynamixels c'est de réduire le couple sur le H-Bridge 1 seconde après le dernier mouvement.
Un moteur DC + une réduction c'est difficile d'aller a contre sens même avec une alimentation faible au niveau du moteurs.
Pour simuler ce compotement avec ton retour de position analogique va falloir un algo qui fait la même chose.
Il faut serrer plein pot pendant 1 seconde en suite tu retourne à la position actuelle Minus un Delta configurable.
Il reste par essai erreur à configurer ce delta pour avoir une bonne prise qui fasse pas chauffer le moteur.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

