Bonjour
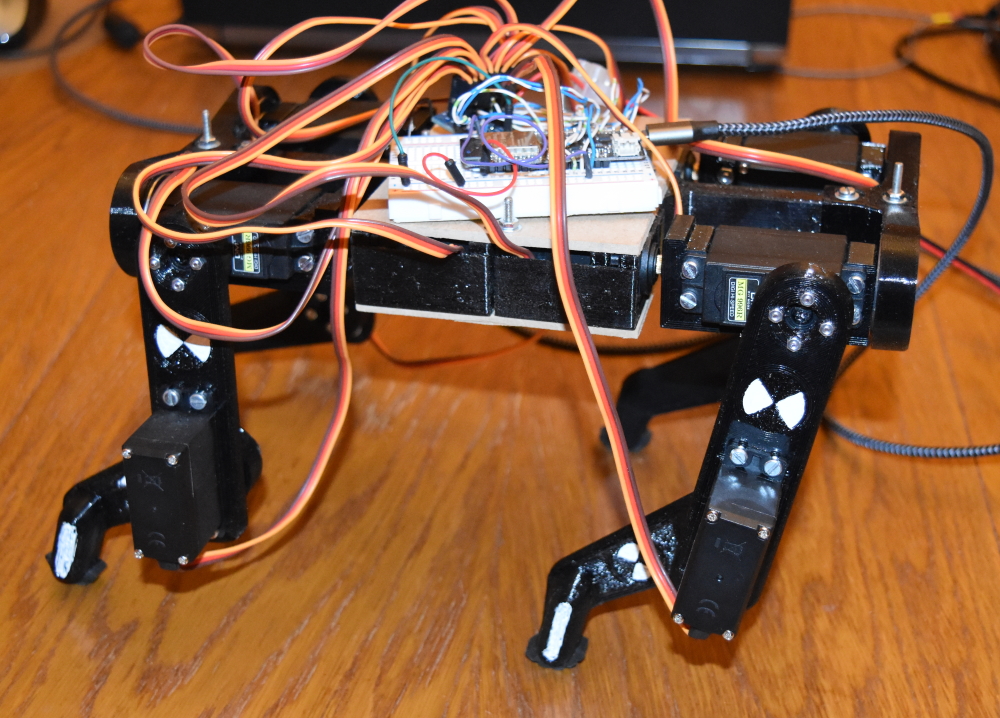
Rantanplan est le robotic dog proposé sur cults 3D, https://cults3d.com/fr/modèle-3d/gadget/robotic-dog
C'est plus une plateforme de développement qu'un robot fini.
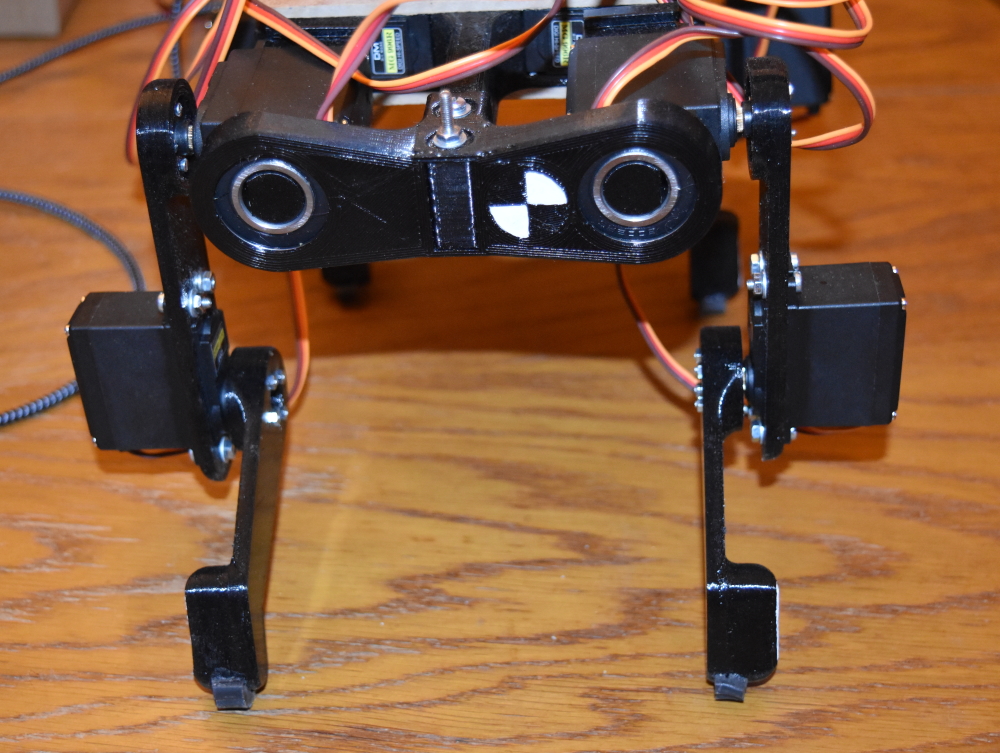
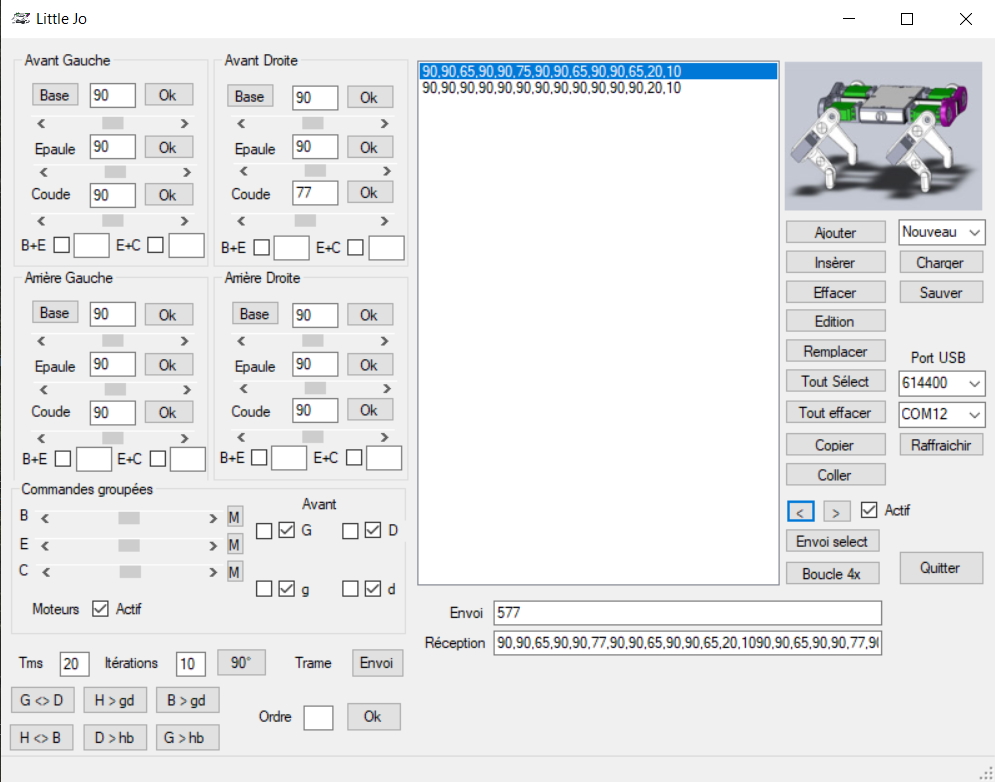
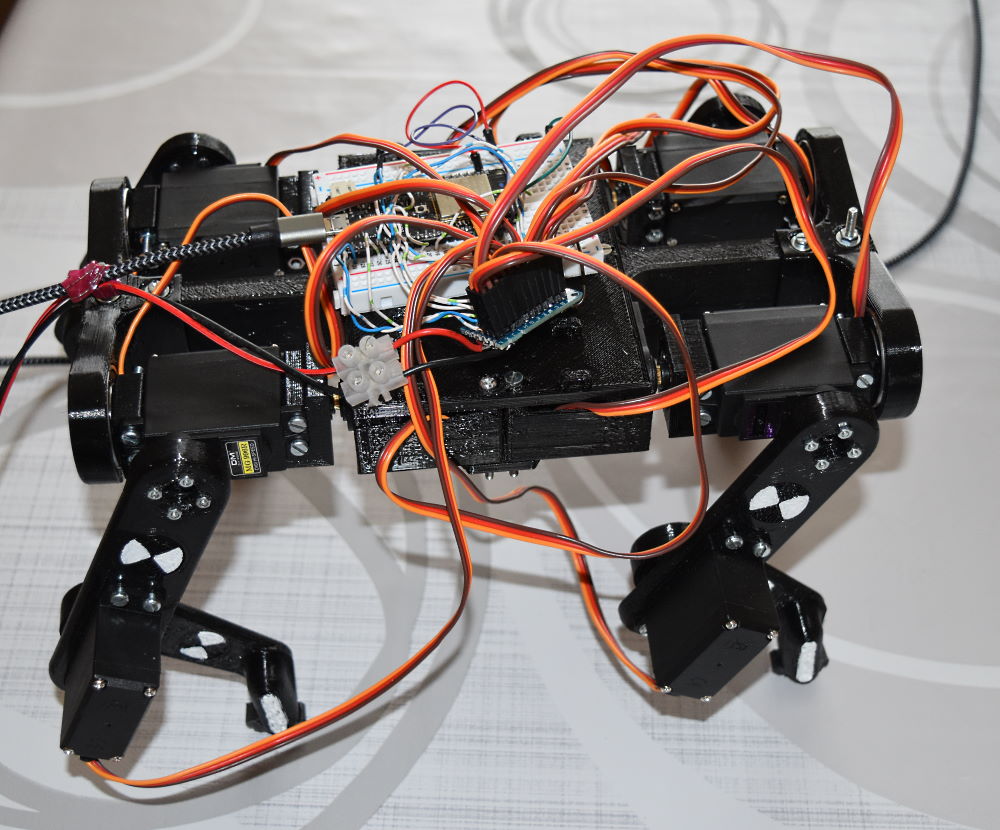
Je vous joins quelques photos du robot et du logiciel de commande des servos que j'ai écrit.
Il permet de coupler les servos et de regrouper plusieurs pattes dans une commande unique.
Une fenêtre mémorise les mouvements qui peuvent être enregistrés et envoyés au robot.
Et j'ai trouvé cette vidéo, j'aimerai y arriver un jour !
https://www.youtube....eature=emb_logo
D'autres précisions viendront bientôt,
Jean