Nouvelle vidéo qui montre que les enchaînements restent assez souples même quand le déport est important.
L'ESP32 calcule 20 itérations d'une position à l'autre. Je ne m'attendais pas à ce que le robot conserve les pattes au même endroit sur le sol.
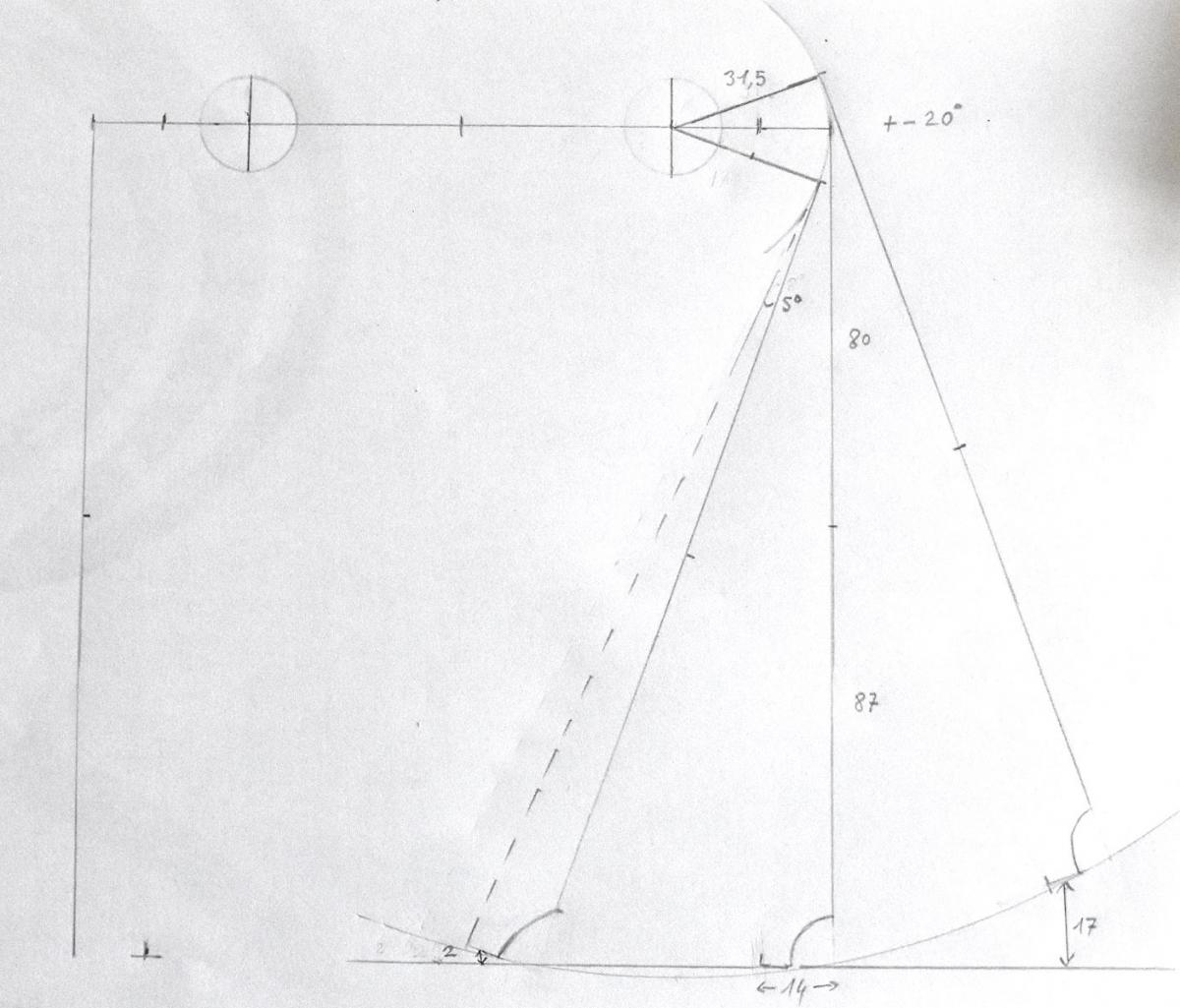
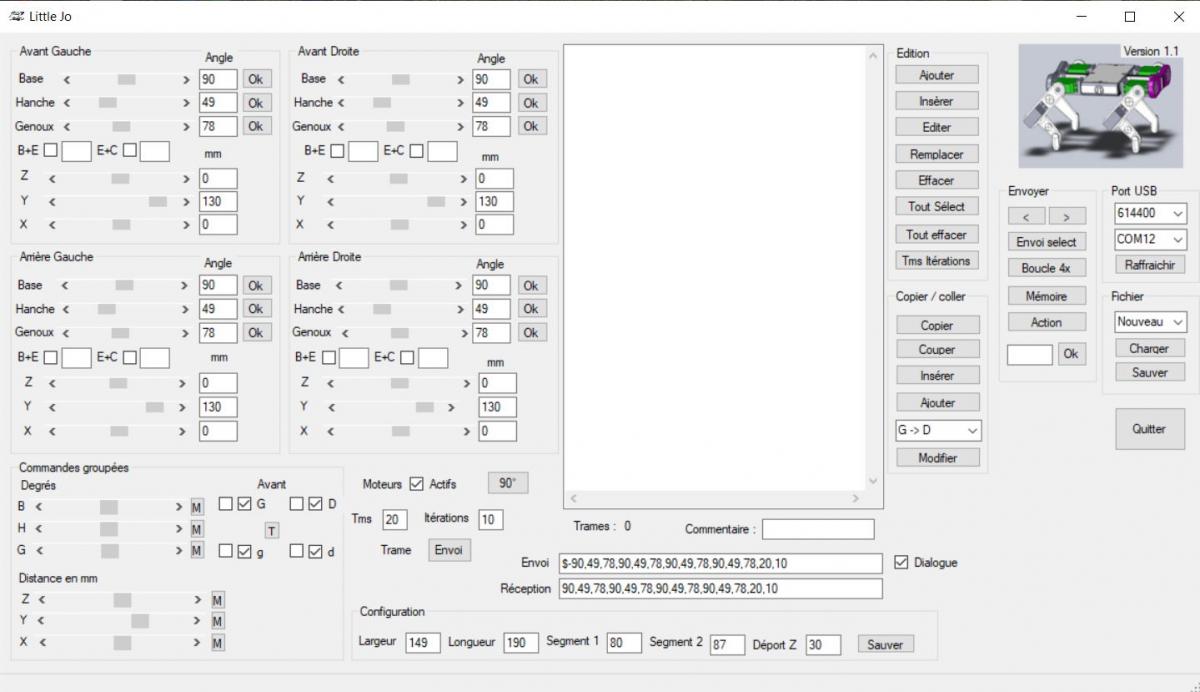
J'ai calculé les positions par trigonométrie et je les ai rentrées dans Little Jo. La hauteur des pattes est la seule commande pour tous les calculs.