En tout cas, c'est très convaincant !
Bravo !

Pilier du forum


Posté 29 mai 2020 - 08:07
En tout cas, c'est très convaincant !
Bravo !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre
Posté 29 mai 2020 - 08:16
Merci Oracid.
Mais je serai satisfait quand il marchera ainsi sur le sol, et il va y avoir pas mal de modifications à faire sur la cadence des pas et l'équilibre.
C'est une marche réglée avec Little Jo car j'ai pas mal de difficultés à intégrer la cinématique.
Pourtant j'aimerai ajouter 3 petits curseurs, X, Y, Z en prise directe sur les moteurs de Rantanplan.
Pilier du forum
Posté 30 mai 2020 - 06:54
Les vidéos d'animation sont très intéressantes, il y en a beaucoup, mais rien ne dit qu'elles sont physiquement viables.
Quitte à analyser la marche du chien (chat), alors autant se baser sur un maitre de l'art, http://www.algodoo.com/algobox/profile.php?id=128 qui utilise un logiciel de CAO Physique, Algodoo. https://www.robot-maker.com/forum/topic/10999-algodoo-modelisation-et-animation-physique/
C'est gratuit, "facile" d'utilisation et on peut analyser pas à pas ce type de simulation.
J'ai posté une vidéo, https://www.robot-ma...pedes/?p=110007
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre
Posté 30 mai 2020 - 06:10
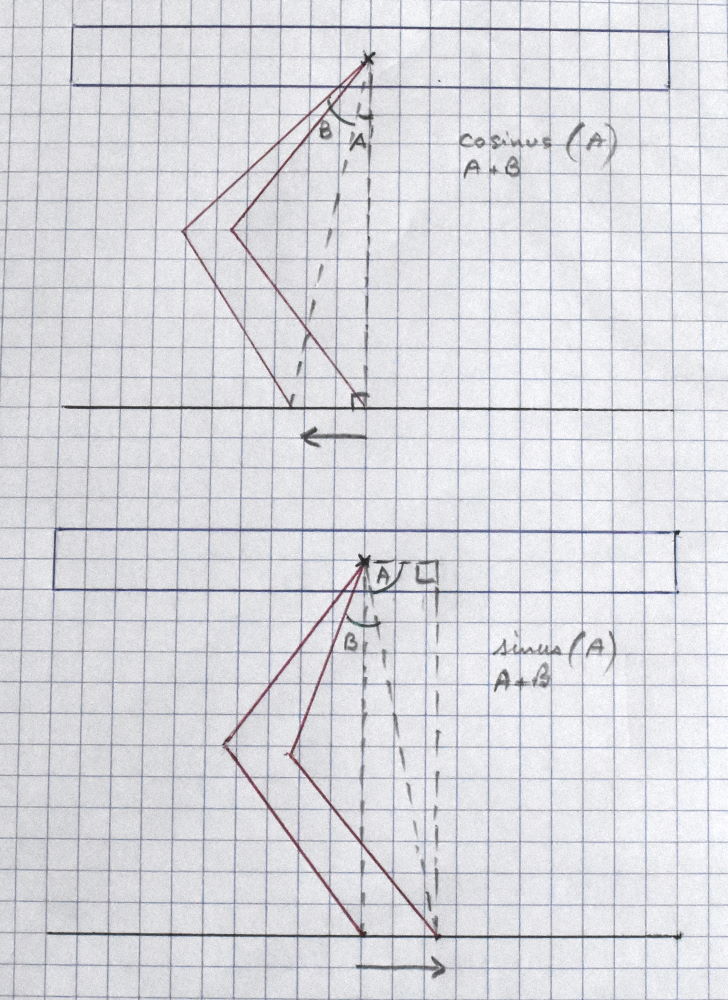
J'ai enfin réussi à calculer par le cosinus et le sinus les positions de Rantanplan.
J'avais assez facilement compris le déplacement dans un sens, mais dans l'autre il m'a fallu plus de temps.
Il suffit de changer de plan. Dans un sens projeter le triangle rectangle sur le sol, dans l'autre sur le robot.
Cela donne ceci. J'espère avoir bien compris.
Pilier du forum
Posté 30 mai 2020 - 08:15
C'est bien, tu avances.
Ici, tu calcules l'angle de l'épaule, mais tu dois également calculer l'angle du coude.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre
Posté 30 mai 2020 - 08:51
Je ne l'ai pas mis, mais c'est la partie la plus facile. Il suffit de calculer l'angle C du triangle a, b, ch opposé à l'hypoténuse
ch = math.sqrt((Y * Y) + (X * X)) # hypoténuse
C = math.acos((( a * a ) + ( b* b ) - (ch * ch )) / ( 2 * a * b ) # loi des cosinus
Coude = 90-math.degrees( C ) # en fonction du sens du servo du robot et de sa position au repos
Et encore merci pour la formule.
Pilier du forum
Posté 31 mai 2020 - 06:11
Pour vérifier que tes calcules sont bons, tu peux en faire la preuve en utilisant le logiciel Geogebra, par exemple.
Moi, j'utilise PowerPoint. Cela me semble plus simple d'utilisation.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre
Posté 02 juin 2020 - 04:20
J'ai implanté un réglage en X et Y à partir des calculs que j'avais établi avec votre aide.
Je travaille sur le Z, il y a des choses assez simples comme le basculement devant / arrière ou sur les côtés.
Le basculement sur la diagonale est plus intéressant. Je pense l'avoir résolu mais j'attends de faire les premiers tests pour vous en parler.
Voici une petite vidéo sur les trajectoires en X et Y de Rantanplan. Un moment une patte glisse mais c'est parce que la patte de gauche s'est coincée sous le chassis.
Staff Robot Maker

Posté 02 juin 2020 - 04:42
C'est top ! ça commence super bien 
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Pilier du forum
Posté 02 juin 2020 - 06:06
Surprenant, qu'il garde sa stabilité malgré certains porte-à-faux.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Habitué

Posté 02 juin 2020 - 06:31
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
Membre
Posté 02 juin 2020 - 06:43
Non, je n'ai pas remarqué. Je mets 5 v ce qui laisse un peu de marge.
Pilier du forum
Posté 02 juin 2020 - 08:07
Non, je n'ai pas remarqué. Je mets 5 v ce qui laisse un peu de marge.
Après chaque essai, tu mets le doigt sur chaque servo. Si c'est chaud, tu le sentiras tout de suite.
En fait, le plus lourd sur ce robot, ce sont les servos, 61g. Si le bras fait 10cm, le servos du bras doit soulever 610g.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre
Posté 02 juin 2020 - 09:18
Le bras supérieur fait 8 cm, le bras inférieur fait 8.5 cm. Le servo tient plus de 10 kg, c'est tout bon.
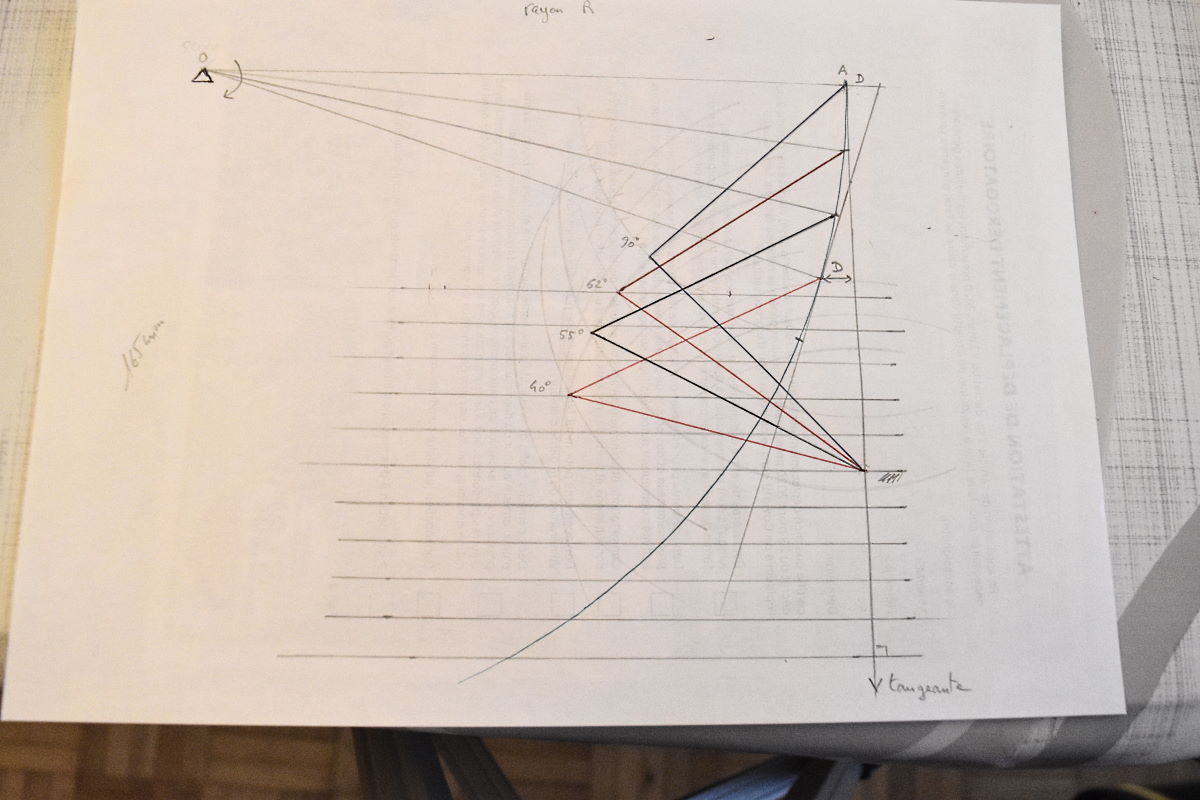
Je vous soumets un problème. J'étudie le mouvement suivant. Le robot a les pattes fixes au sol, et il bascule sur l'avant. L'arrière doit pivoter mais ne change pas de hauteur.
Pour déterminer l'angle de pivotement il suffit de considérer un triangle rectangle dont le petit côté est la distance vers le sol et le côté adjacent la longueur du robot. On a l'hypoténuse puis l'angle. Oui mais le robot pivote sur un cercle. Et les pattes sont fixes. (voir schéma). Tout se passe pour le robot comme s'il avançait les pattes vers l'avant et trouver cette distance me pose problème. On doit pouvoir en calculant l'angle d'intersections des deux tangeantes et le point d'intersection. Mais cela est hors de ma portée.
Y-a pas un truc plus simple ?
Membre
Posté 02 juin 2020 - 09:43
Je pense à cette solution simple.
Considérons le petit triangle rectangle en haut à droite avec le côté adjacent D. L'angle aigu est égal à l'angle O sur le papier. Le grand côté qui va de l'angle droit à l'intersection des tangeantes est égal à la distance vers le sol / 2.
Donc si on veut faire piquer l'avant du robot de 6 cm ce qui donne 18° environ, on a pour calculer la distance d'avancement des pattes l'angle aigu 18°et le grand côté de l'angle droit = 3cm
Il faut ensuite trouver le petit côté.
Habitué
Posté 02 juin 2020 - 10:36
Une astuce qui peut aider à faire des cinématiques comme tu fais, c'est de faire à l'envers. Imagines que tu fixes le corps du robot à l'horizontale tout le temps, par contre, tu fais tourner le sol en pente et tu calcules les bons angles pour les pieds touchent le sol. C'est équivalent en géométrie mais ça permet quelques fois de simplifier la trigonométrie.
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
Membre
Posté 03 juin 2020 - 08:21
Merci Thot, et oui en remontant le sol, on retrouve le même angle et l'avance du pied = hypotenuse - grand côté.
Je n'y avais pas pensé.
Membre
Posté 04 juin 2020 - 09:32
C'est un programme en python qui m'a donné les angles et la distance d'avancement du pied. J'ai ensuite mis les angles dans Little Jo








0 members, 0 guests, 0 anonymous users




