

Objectif : Découvrir comment fonctionne un driver de moteur à courant continu
Difficulté : 1/5
Temps d'exécution : 10min
Matériel nécessaire :
- Un contrôleur de moteur à courant continu
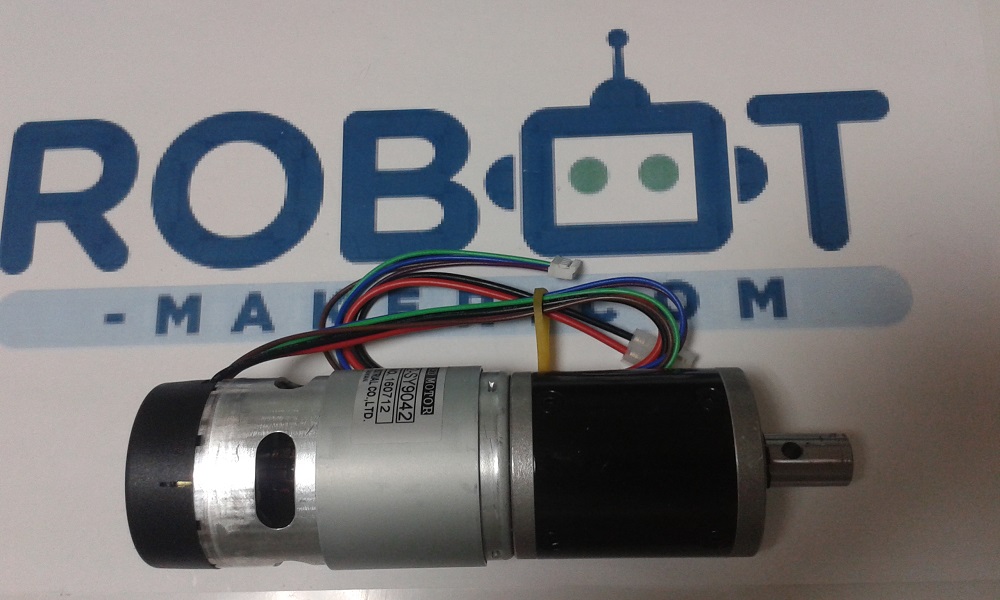
- Un moteur à courant continu (avec ou sans roue)
- Une carte Arduino Uno
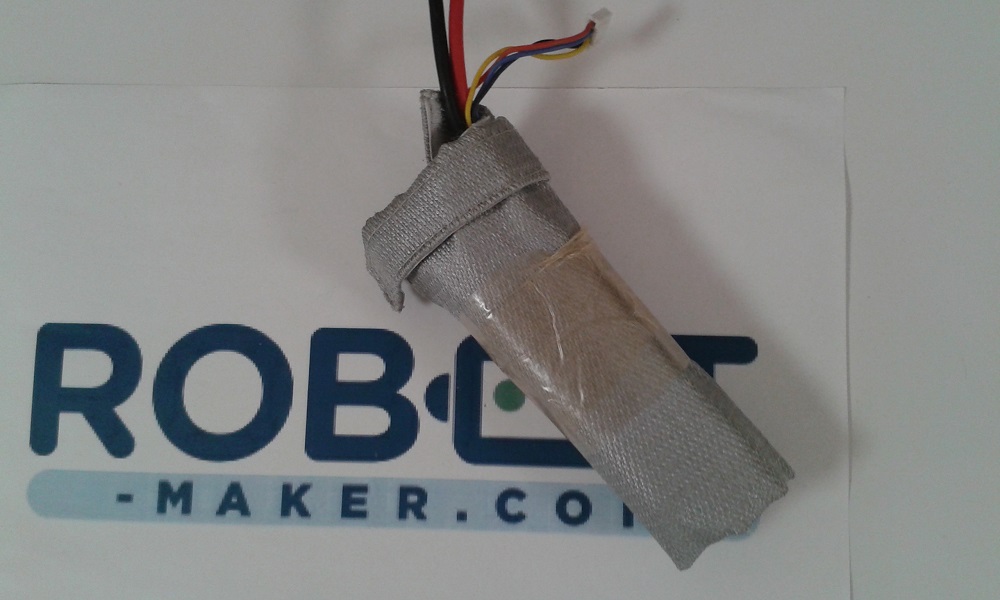
- Une batterie LiPo dans son sac ignifuge
- 4 fils mâle femelle
Les moteurs à courant continu sont faciles à utiliser et peuvent servir dans de nombreux robots ou projets ! Vous pouvez par exemple les utiliser pour fabriquer votre propre robot suiveur de ligne.
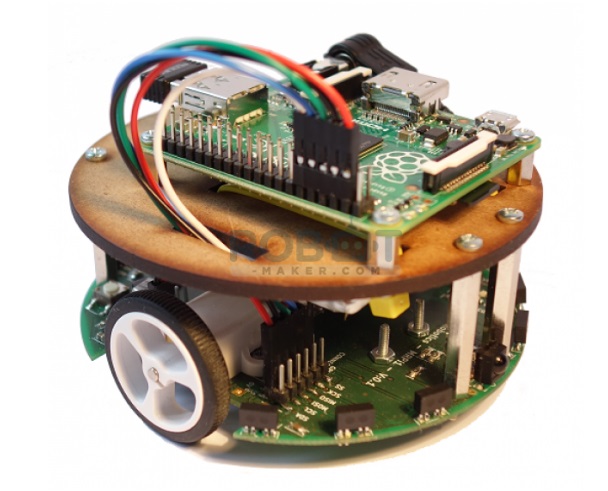
Les robots MRPi1 et Grand'Vadrouille utilisent des moteurs à courant continu.
Présentation du driver de moteur à courant continu :
Pour piloter un moteur à courant continu, il faut un driver prévu à cet effet.
Ce genre de driver est souvent composé d’un pont en H, d’un circuit de régulation de tension et de quelques connecteurs pour relier les moteurs et une batterie.
Le driver que j'utilise peut piloter un ou deux moteurs à courant continu fonctionnant entre 12V et 30V. Ce driver peut être utilisé par des microcontrôleurs en 3.3V ou 5V, d’ailleurs sa prise 5V fourni 200mA ce qui est suffisant pour alimenter une carte Arduino.
Ce driver contrôle chaque moteur à l’aide de 3 sorties numériques : 2 sorties qui contrôle la direction du moteur et une sortie en PWM qui pilote la vitesse du moteur.
Pour ce tutoriel, il faut : le driver, un moteur à courant continu,

une batterie Li-Po 12V dans son sac ignifuge, une carte Arduino Uno.
Pour piloter un moteur cc avec ce driver, voici le montage à réaliser : (attention le driver n’est pas le bon sur le montage).
Pour télécharger le montage : http://fritzing.org/projects/driver-moteur-cc
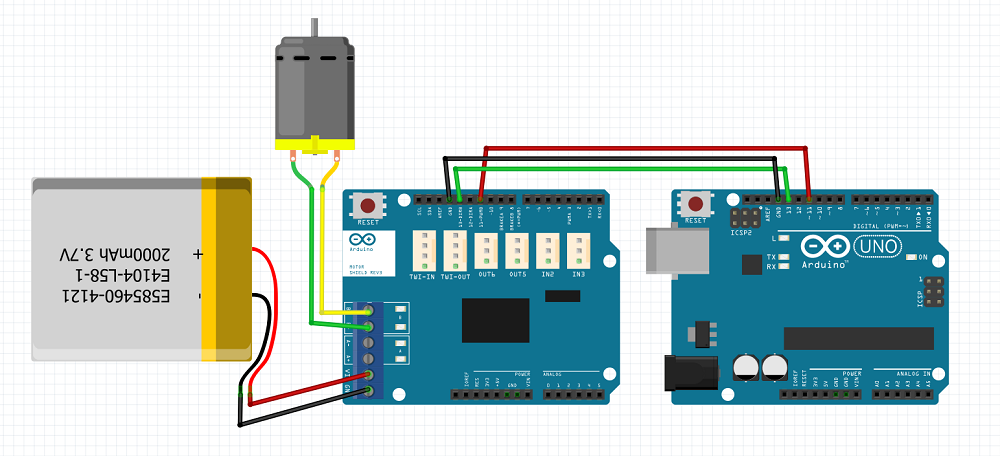
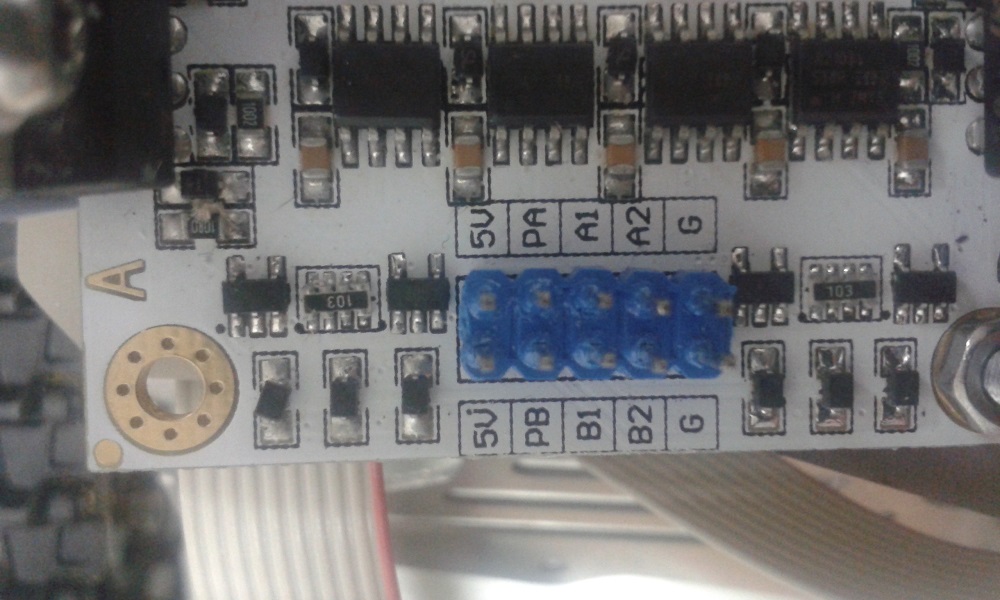
Avec le bon driver, les connections sont les suivantes :
- La broche GND de la carte Arduino reliée à celle du driver
- Une broche PWM de l’Arduino reliée à la broche PB du driver
- Deux broches numériques de la carte reliées aux broches B1 et B2 du driver.
Commençons par brancher le connecteur de la batterie Li-Po au driver à l’aide du bornier à vis (la batterie n’est pas encore reliée à son connecteur). Il faut faire attention à ce que les fils ne soit pas trop long. Au besoin les raccourcir avec une pince coupante pour qu’il ne dépasse pas du bornier.
Attention à ne pas se tromper sur la polarisation lors du branchement !

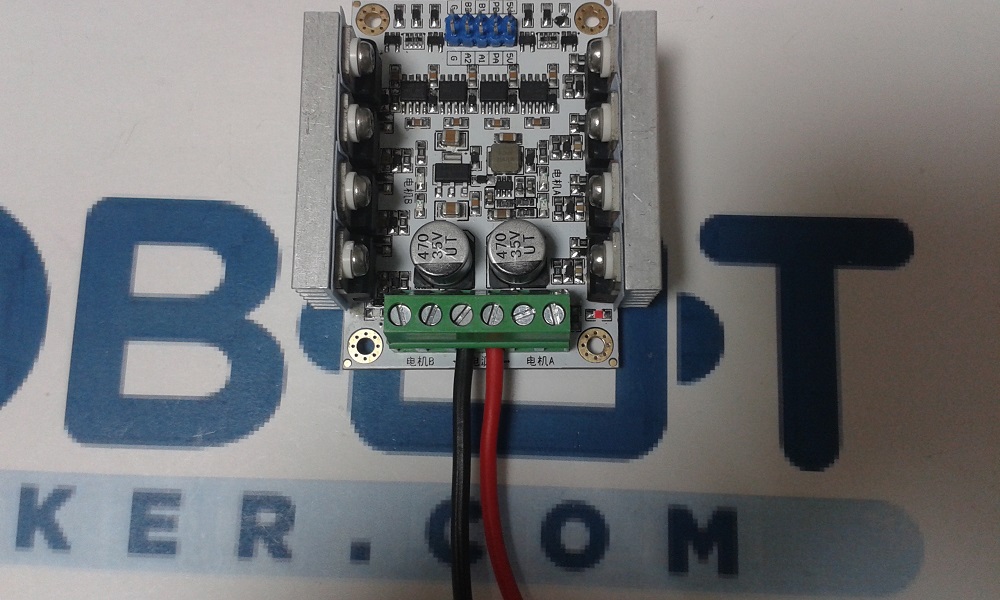
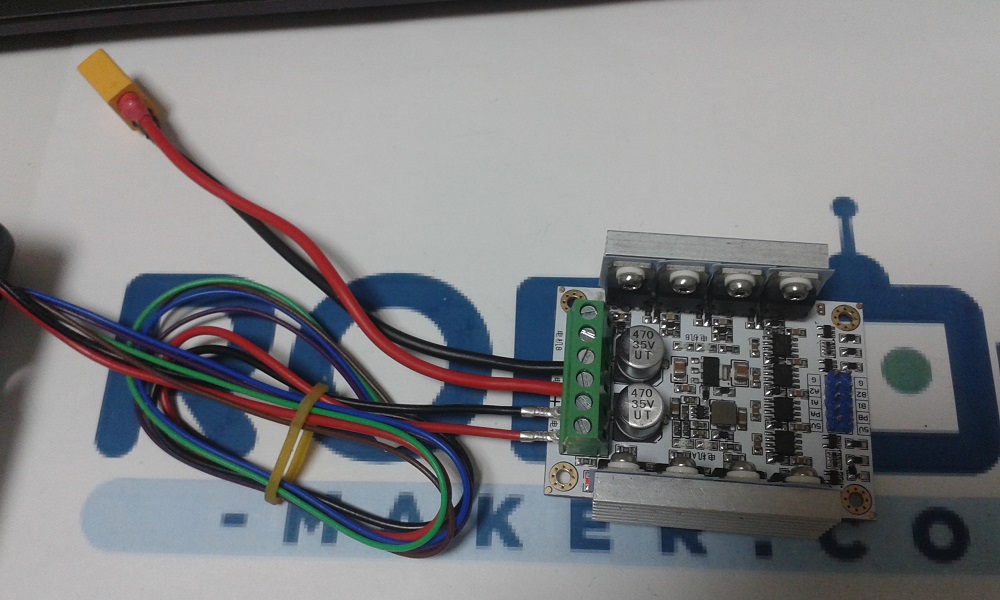
On connecte ensuite de la même façon le moteur cc. Celui que j’utilise est équipé d’un encodeur, d’où les fils qui ne sont pas connectés.
C’est le moment de brancher la batterie ! Avant cela, vous pouvez utiliser le testeur de tension en le laissant connecté à la batterie. De cette manière, vous verrez si votre batterie se décharge de façon anormale. Si vous ne savez pas comment brancher votre batterie, le tutoriel qui explique comment rallonger les fils d'une batterie va vous aider !

Si la led du driver est allumée, c’est qu’il est correctement alimenté. Maintenant on vérifie avec un multimètre si la tension entre les bornes “G” et “5V” est bien de 5V.
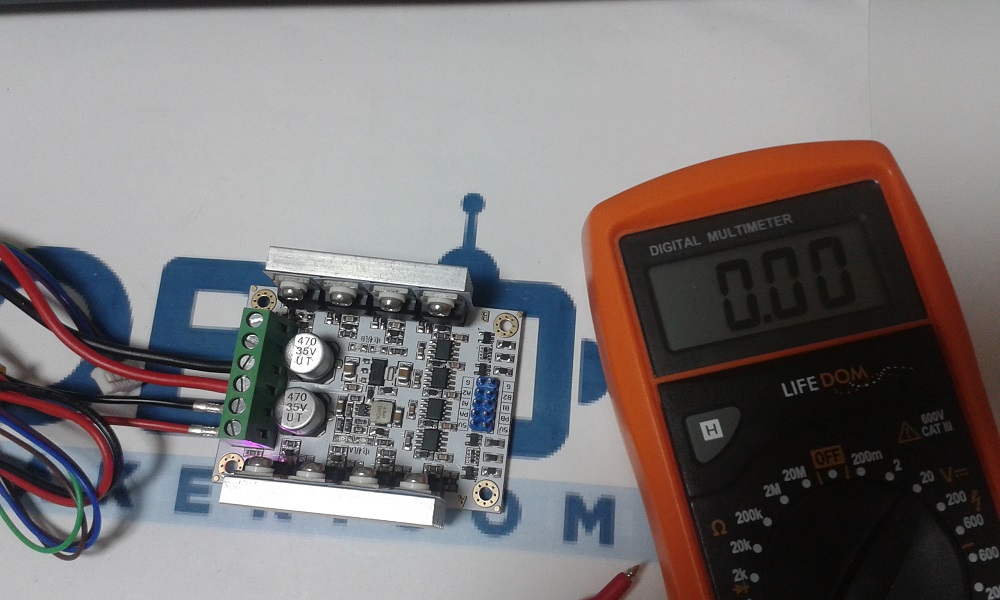
La tension que m’indique le multimètre est bien de 5V, je pourrais donc alimenter la carte Arduino avec le driver pour piloter un robot à distance.
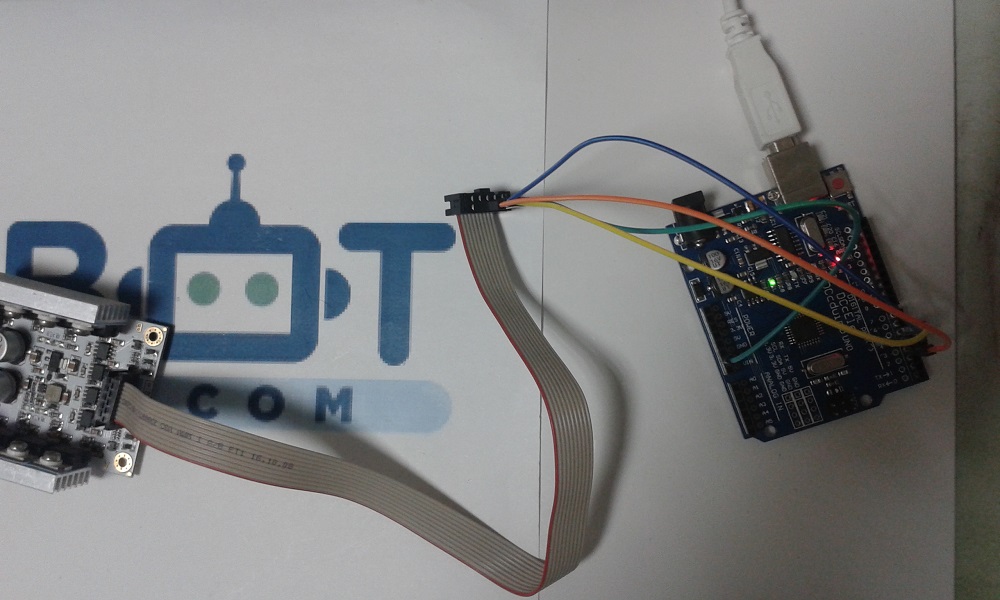
Pour le moment la carte sera alimentée par le cordon USB et pour éviter une double alimentation, la sortie 5V du driver ne sera pas connectée à la carte Arduino.
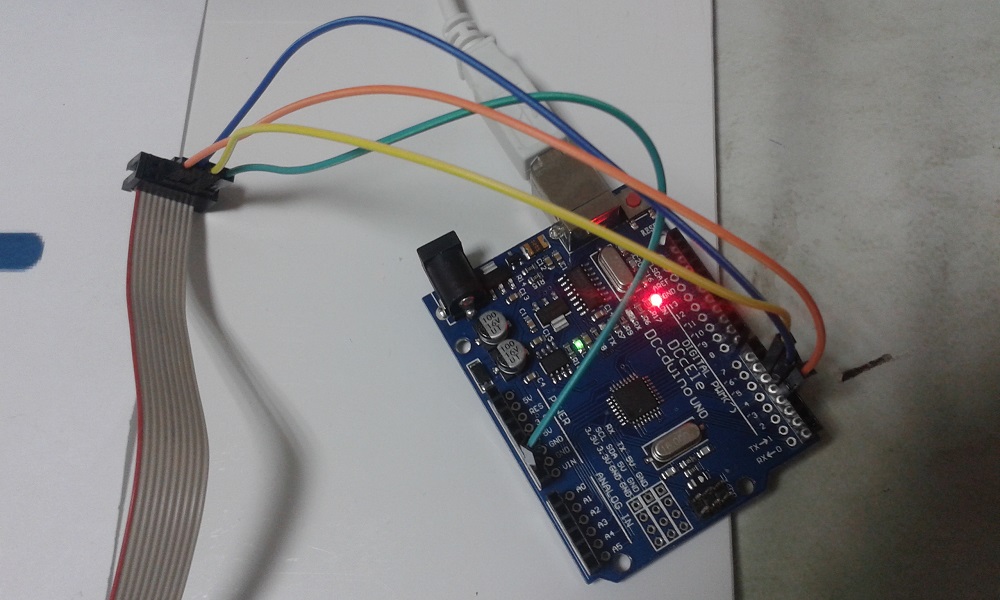
Les connections peuvent être faites avec des câbles classiques ou bien avec un connecteur bus, ce qui est parfois plus pratique.
Fonctionnement du driver de moteur à courant continu :
Comment piloter la vitesse des moteurs avec ce driver ?
Sur ce driver, il y a deux puces de commande de moteurs (une pour chaque moteur) qui reprennent le principe du pont en H.
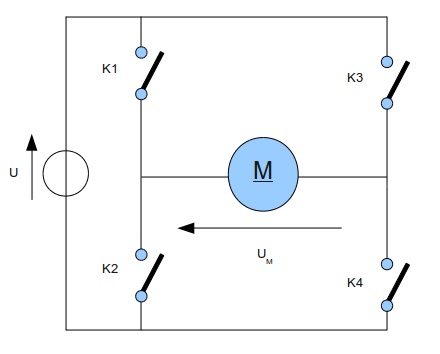
Sur le pont en H, le driver commande les interrupteurs K1 et K4 ensemble et les interrupteurs K2 et K3 ensemble.
Si K1 et K4 sont en position fermé, le moteur fonctionne en avant.
Si K2 et K3 sont en position fermé, le moteur fonctionne en arrière.
Les 4 interrupteurs ne peuvent pas être fermés en même temps.
La vitesse du moteur est proportionnelle à la vitesse d’ouverture/fermeture des interrupteurs.
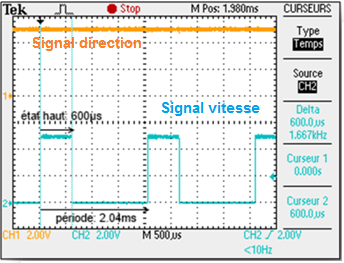
Les signaux de contrôle de la vitesse des moteurs sont de type PWM (Pulse Width Modulation), ce sont des signaux qui peuvent prendre deux états : l’état haut ou l’état bas. La vitesse est modulée en fonction de la durée de ces états, plus l’état haut dure longtemps et plus le moteur tourne vite.
La direction est contrôlée par deux sorties numériques sur le driver.
L'image ci-dessous représente les signaux de commande : en bleu le signal de vitesse (PWM) et en orange le signal de direction.
Une fois le câblage réalisé, il faut créer le programme à mettre dans la carte.
Voici un exemple de code pour contrôler un moteur à l’aide des touches du clavier.
Pour commander le moteur, il suffit d’ouvrir le moniteur série, de rentrer la touche au clavier et de valider.
Le résultat en vidéo :
Et voilà pour le fonctionnement de ce driver, vous pouvez désormais essayer de piloter deux moteurs à courant continu en même temps ! Si vous avez besoin de quelques informations complémentaires, une page de test est consacrée à ce driver sur le forum. Ce driver peut facilement être utilisé pour réaliser un robot à chenille soi-même. Et n'hésitez pas à partager vos montages !
Salut, merci pour le tuto :) J'ai fais plus ou moins la même chose chez moi et j'ai réussi à griller les composants de régulation de tension 12V->5V. Je pense que mon erreur est de ne pas avoir étudier le courant passant par mes moteurs (ce que j'essaye de trouver maintenant). Donc attention ;)