Tu es luthier ?
Je n'aurais pas la prétention de te donner un cours de maths, je n'ai vraiment pas le niveau.
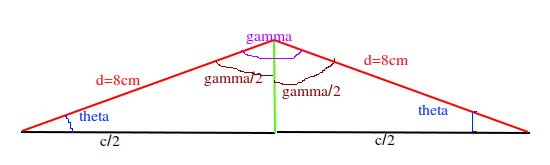
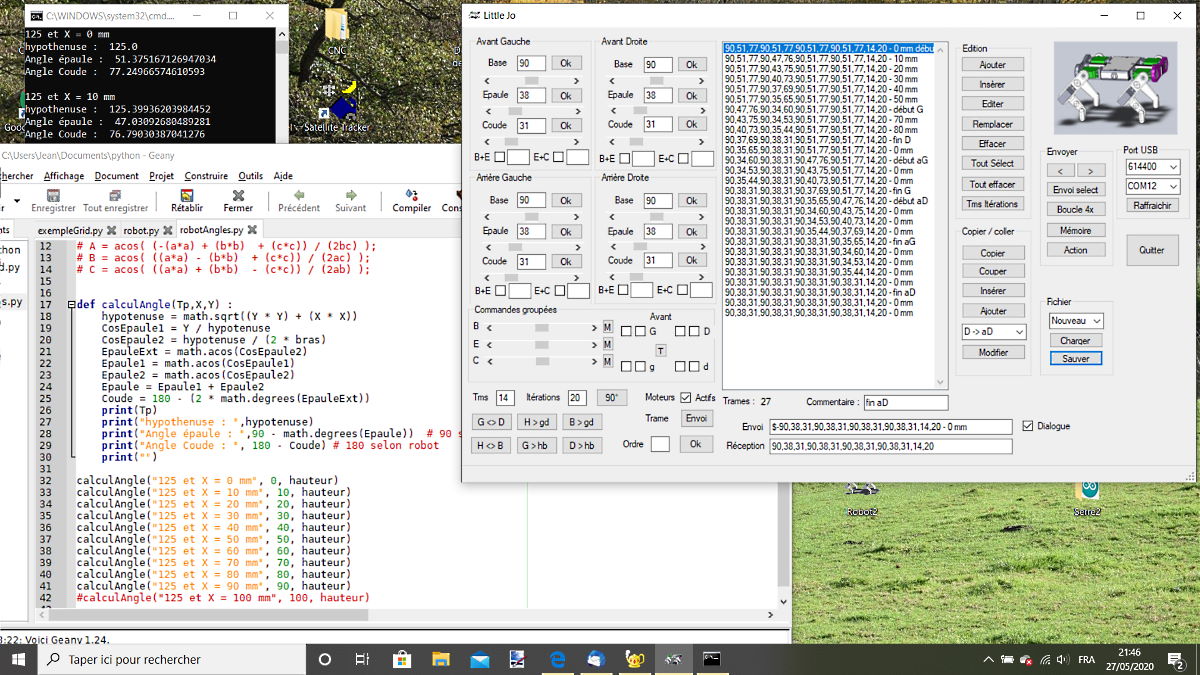
Ce que je te propose, pour trouver la solution à ton problème, c'est de jeter un coup d'oeil à ce cours et en particulier à la vidéo 19 qui traite de la loi des cosinus. Là tu auras le moyen de répondre à ta question. Tu peux accessoirement regarder ma vidéo qui est le résultat direct de ce que j'ai appris dans ce cours, mais il y en a beaucoup d'autres qui sont très bien également.
https://www.youtube....V7v7pWr1hlNV4_9
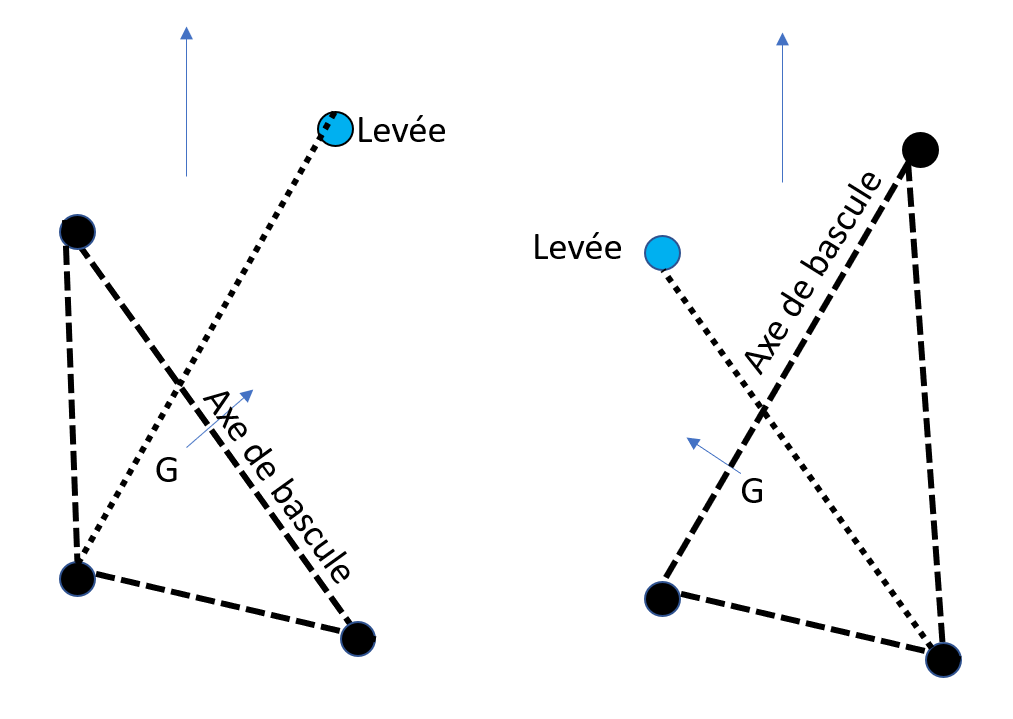
Ceci dit, je pense que tu prends le problème à l'envers. Je peux me tromper, mais à mon avis, il ne faut pas se baser sur le déplacement du corps.
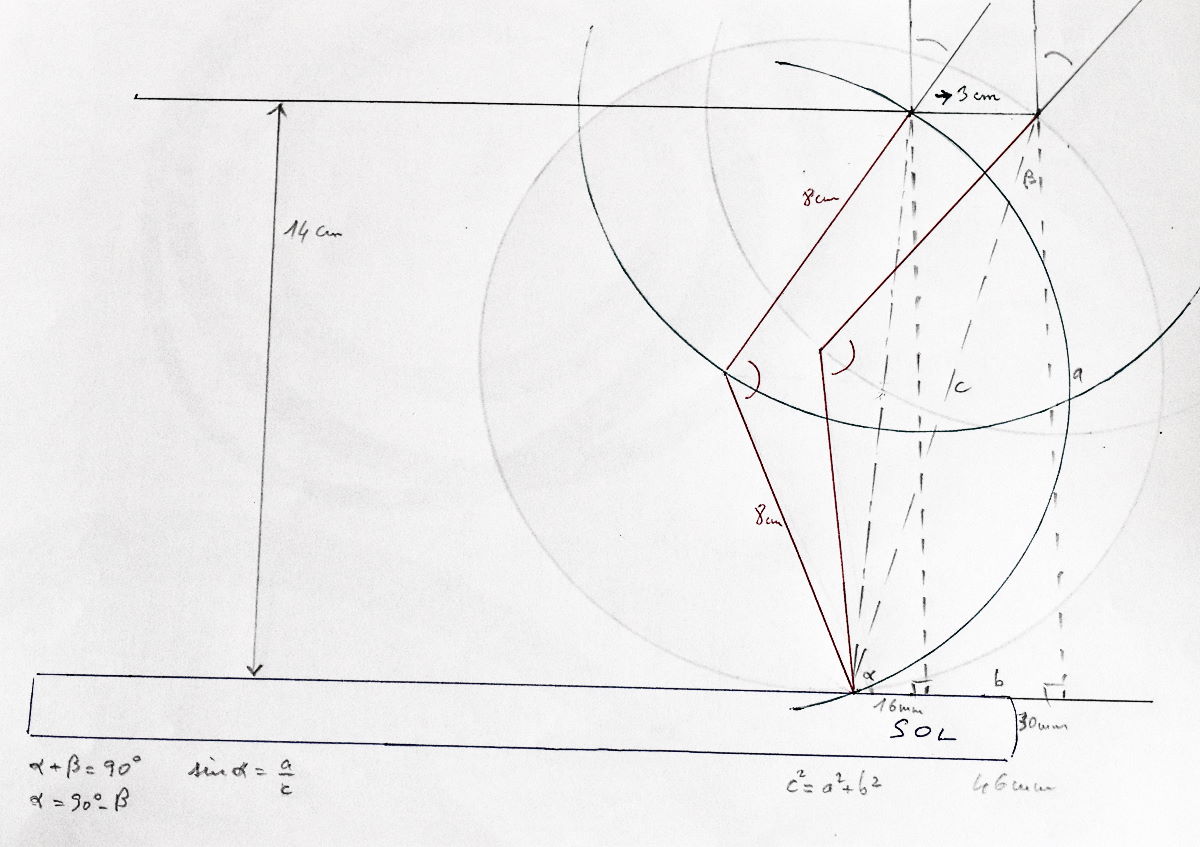
Le but est d'analyser la figure que trace l'extrémité d'une patte. En principe, la patte doit tracer une droite partant de x vers -x. Ou de l'avant vers l'arrière pour parler français.
C'est ce mouvement qui fera avancer ton quadrupède. Puis il faut répéter ce mouvement, il faut donc lever la patte et revenir au point de départ.
Cette droite est décrite par une succession de points. Chaque point déterminera la position des angles du triangle que forme la patte.
En partant du corps tu détermines la cinématique, mais en partant de l'extrémité de la patte tu détermineras ce que l'on appelle la cinématique inverse.
Pourquoi partir de l'extrémité de la patte ? Et bien, parce qu'il semblerait que ce soit plus facile, plus simple.