


Bonjour,
Le SCS2332 est un servo au format micro, digital, produit par Feetech (Chine).

Il s'agit d'un servo adapté aux applications de robotique : il se pilote via une liaison série (niveaux TTL, half-duplex) et il fournit un retour d'informations (position, vitesse, courant, température, et tension d'alimentation).
Caractéristiques principales :
Le servo tourne librement sur 360°.
http://www.feetechrc.com/product-name_55300.html
http://www.feetechrc.com/product-name_55300.html
La bonne nouvelle est qu'il semble fonctionner correctement avec une alimentation directe Lipo 2S (8.4V). La vitesse de rotation est très rapide à cette tension. Le courant d'appel à vitesse maximale est supérieur à 250mA à vide. Je n'ai pas encore testé en charge et en endurance. Donc, il reste un point de vigilance sur la capacité du servo à fonctionner de manière fiable en 8,4V. Apres quelques échanges avec le support technique de Feetech, leurs ingénieurs m'ont confirmé qu'il n'y a pas de contre-indication à faire fonctionner ce servo avec une batterie 2S en direct (sans BEC) bien qu'il soit commercialisé comme "6V 4.5kg.cm" dans leur catalogue.
Package :
Un palonnier alu circulaire taraudé 8 x M2 est fourni de base. Un hub 3 ports et un cordon sont également joint pour chaque servo.

Test avec l'adaptateur USB FE-URT-1 :
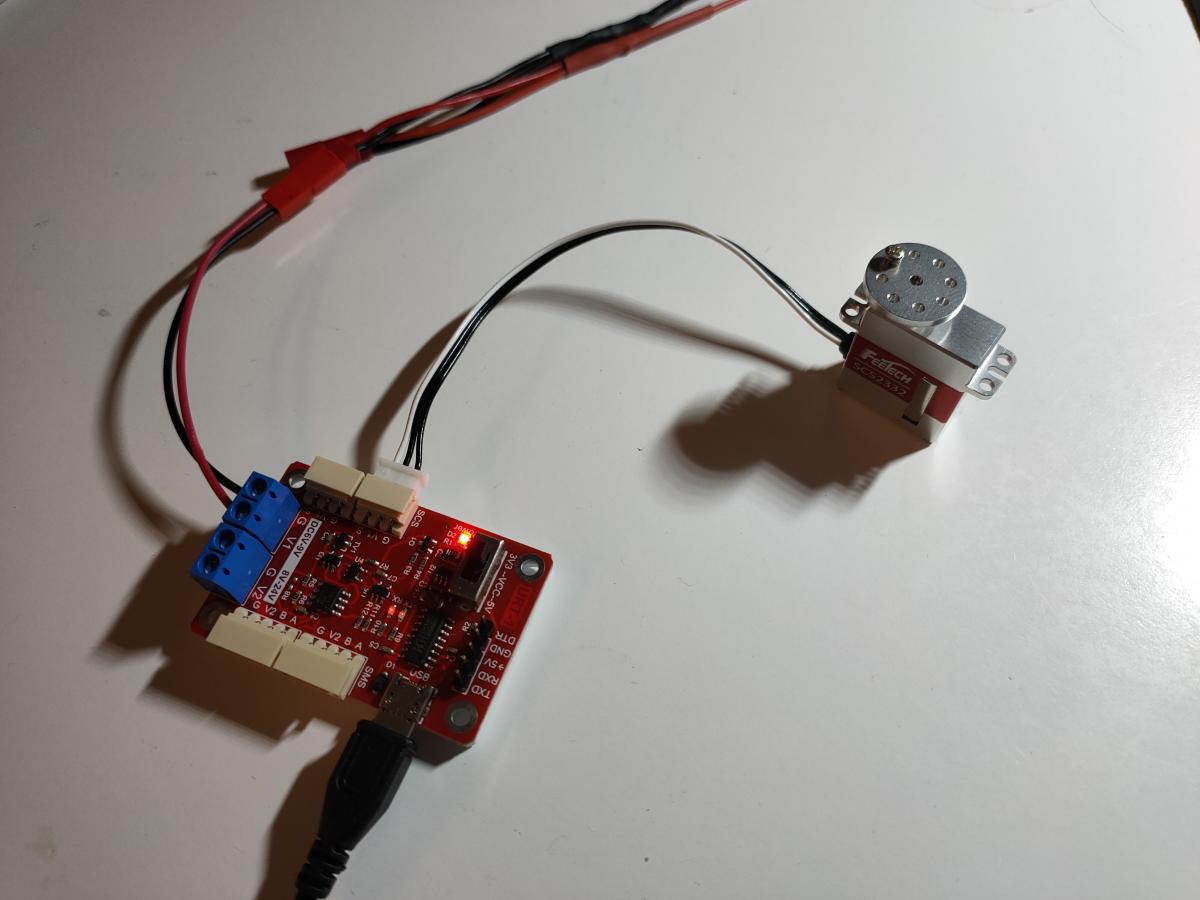
Comparaison avec un MG92b :


Registres de configuration :
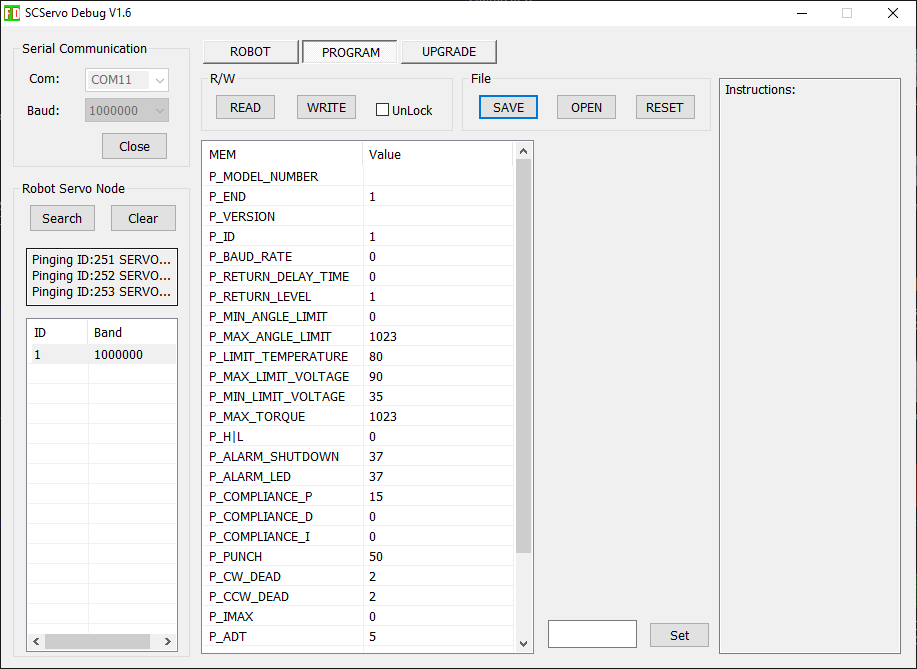
On notera que le PID est configurable, ainsi que la vitesse et l'accélération de rotation. La position est encodée sur 10 bits.
Retour d'information temps réel :
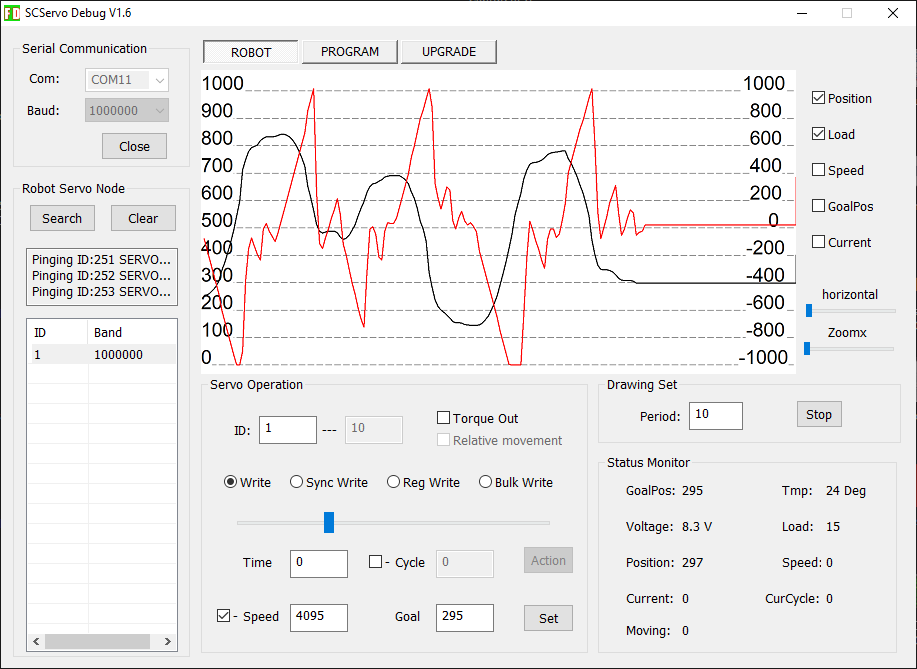
Le bus série développé par FeeTech offre un débit maximum de 1Mbps. Il semble supporter les commandes de type "Sync Write" et "Bulk Write", mais pas "Sync Read". Ainsi, une même trame de commande envoyée sur le bus série peut etre reçue et décodée par plusieurs servo pour synchroniser leur rotation (chaque servo est commandé individuellement en position, vitesse...). Contrairement au protocole Dynamixel 2.0, il n'existe par d'équivalent des commandes de type "Sync Read" et "Bulk Read" pour le retour d'information. Il faudra donc interroger les servo un à un pour obtenir leurs informations courantes.
Actuellement, j'ai utilisé le logiciel FD pour piloter les servo Feetech depuis le PC. Je n'ai pas encore essayé de les piloter depuis une carte Arduino ou autre µC. Néanmoins, le support Feetech m'a envoyé les spécifications d'interfaces et la liste des registres de contrôle sur demande avec une excellente réactivité.
Interface Arduino :
Si le module FE-URT-1 est trop encombrant, il existe un module plus petit pour faire l'adaptation électrique : TTLinker.
https://www.robot-ma...inker-mini.html
Je complèterai ce sujet avec mes prochains essais. Beaucoup de paramètres configurables ne sont pas bien documentés (ex. wheel mode ?).
A suivre,
Patrick.
NB : Je ne sais pas poster de vidéo sur ce forum.













