Bonjour à tous,
Depuis peu j'ai appris le langage Python avec un objectif créer un Robot Delta.
Je me suis intéressé à la vision et à la reconnaissance d'image (Tensorflow).
Désormais je compte créer un mini robot Delta qui s'active selon les objets qui passent devant lui et donc utiliser une caméra.
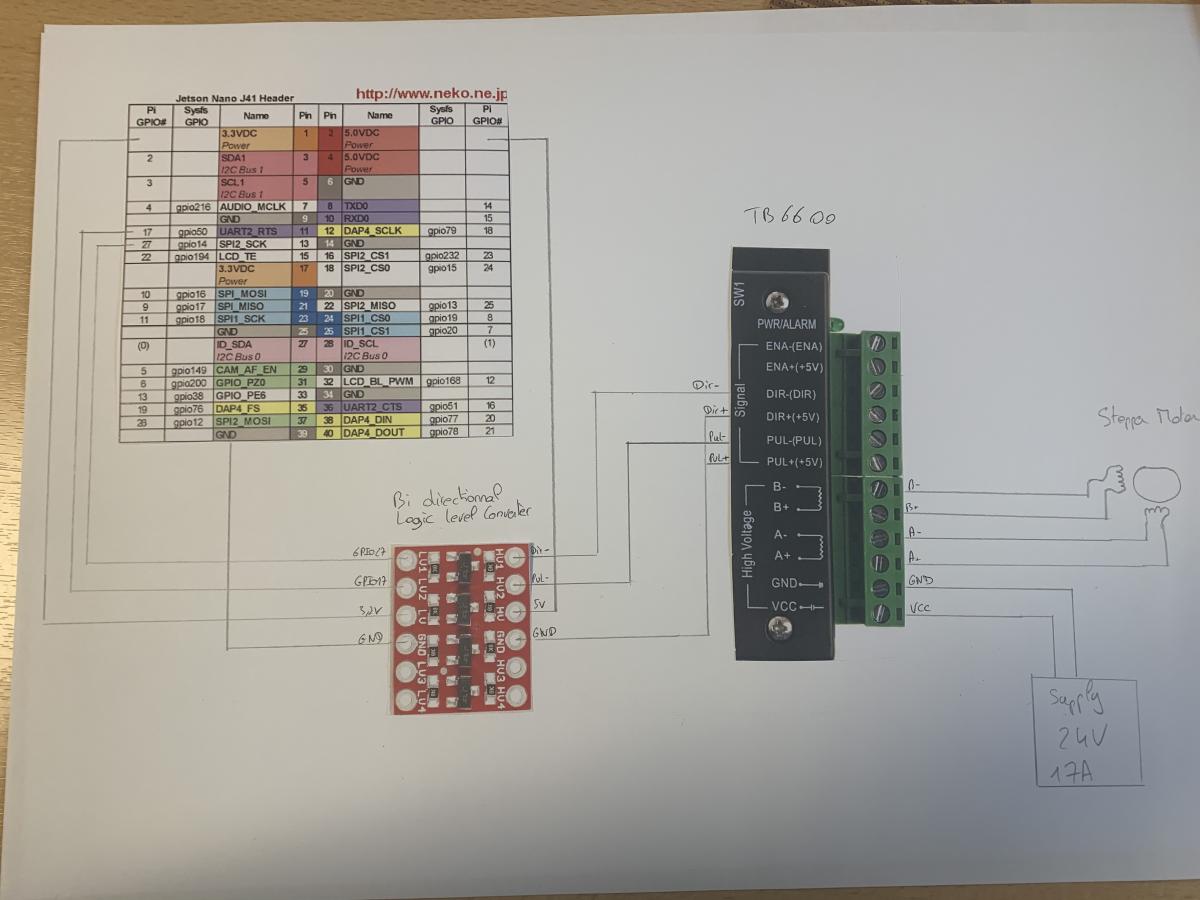
Pour cela je me suis procuré un Jetson Nano, des moteurs nema23, une alimentation(24V) et des drivers. Mais je n'ai aucune idée de comment brancher tout cela.
J'ai acheté des TB6600 qui envoient les informations en 5 volts alors le jetson accepte que 3.3V j'attend de recevoir mes convertisseurs de niveau logique (j'espère que ca fonctionnera).
Je suis ici pour comprendre comment il faut brancher tout ces moteurs au Jetson et au drivers mais aussi pour programmer le robot.
Quelqu'un a t-il déjà conçu un robot delta programmé en python avec utilisation de caméra?


 ) c'est très bien pour utiliser une caméra, par contre c'est pas forcément le meilleur choix pour piloter un moteur pas à pas ...
) c'est très bien pour utiliser une caméra, par contre c'est pas forcément le meilleur choix pour piloter un moteur pas à pas ...